Презентация Моделирование систем управления с управляющими микро ЭВМ онлайн
На нашем сайте вы можете скачать и просмотреть онлайн доклад-презентацию на тему Моделирование систем управления с управляющими микро ЭВМ абсолютно бесплатно. Урок-презентация на эту тему содержит всего 32 слайда. Все материалы созданы в программе PowerPoint и имеют формат ppt или же pptx. Материалы и темы для презентаций взяты из открытых источников и загружены их авторами, за качество и достоверность информации в них администрация сайта не отвечает, все права принадлежат их создателям. Если вы нашли то, что искали, отблагодарите авторов - поделитесь ссылкой в социальных сетях, а наш сайт добавьте в закладки.
Оцените презентацию от 1 до 5 баллов!
- Тип файла:ppt / pptx (powerpoint)
- Всего слайдов:32 слайда
- Для класса:1,2,3,4,5,6,7,8,9,10,11
- Размер файла:346.25 kB
- Просмотров:107
- Скачиваний:2
- Автор:неизвестен
Слайды и текст к этой презентации:
№1 слайд
Содержание слайда: Моделирование систем управления с управляющими микро эвм
Проф. Григорьев В.А.
№2 слайд
Содержание слайда: Содержание
Моделирование цифровых САУ. Основные положения.
Импульсные системы. Система импульсная линейная.
Алгоритм моделирования цифровых САУ с учетом квантования по времени.
Математические модели объектов и систем с дискретным управлением Дополнительные пояснения для самостоятельного изучения
№3 слайд

Содержание слайда: Введение
В настоящее время при создании цифровых автоматизированных систем возможна реализация двух подходов к созданию АСУ:
Использование централизованного управления на базе, как правило, многомашинной или многопроцессорной ЭВМ.
Использование распределенных децентрализованных микропроцессорных систем управления, содержащих устройство управления в каждом канале одномерной или многомерной системы.
№4 слайд

Содержание слайда: В первом случае ЦУЭВМ используется для управления сложными объектами и реализует управление десятками динамических объектов или систем.
В первом случае ЦУЭВМ используется для управления сложными объектами и реализует управление десятками динамических объектов или систем.
Как правило, управляющий комплекс резервируется для повышения надежности САУ. Структура СУ в рассмотренном случае имеет вид:
№5 слайд

Содержание слайда:
№6 слайд
Содержание слайда: Система содержит:
Ряд входных АЦП преобразователей П1-ПN, преобразующих сигнал с аналоговых датчиков для поступления на коммутатор К1.
Управление коммутаторами К1, К2 (мультиплексорами) осуществляется по команде ЦУЭВМ.
Сформированное управляющее воздействие ЦУЭВМ для каждого канала запоминается на запоминающих устройствах ЗУ1-ЗУN на весь интервал квантования по времени для обслуживания контура управления.
№7 слайд
Содержание слайда: Управляющее воздействие U1-Un в течение интервала квантования поступают на исполнительные механизмы ИМ1-Имn пропорционального или интегрирующего типов, что требует формирование управляющих воздействий U1-Un либо в полных переменных, либо в приращениях.
Управляющее воздействие U1-Un в течение интервала квантования поступают на исполнительные механизмы ИМ1-Имn пропорционального или интегрирующего типов, что требует формирование управляющих воздействий U1-Un либо в полных переменных, либо в приращениях.
На рисунке показаны АЦП и ЦАП, которые с определенной точностью преобразуют аналоговый сигнал в цифровой и цифровой в аналоговый. Чем выше разрядность АЦП и ЦАП, тем более точно обрабатываются сигналы.
№8 слайд

Содержание слайда: Такая система может быть связанной многомерной, если управление осуществляется связанным многомерным объектом, и не связной многомерной, если управление по переменным осуществляется совокупностью одномерных систем.
Такая система может быть связанной многомерной, если управление осуществляется связанным многомерным объектом, и не связной многомерной, если управление по переменным осуществляется совокупностью одномерных систем.
В последнем случае каждая одномерная система может быть представлена следующей моделью:
№9 слайд
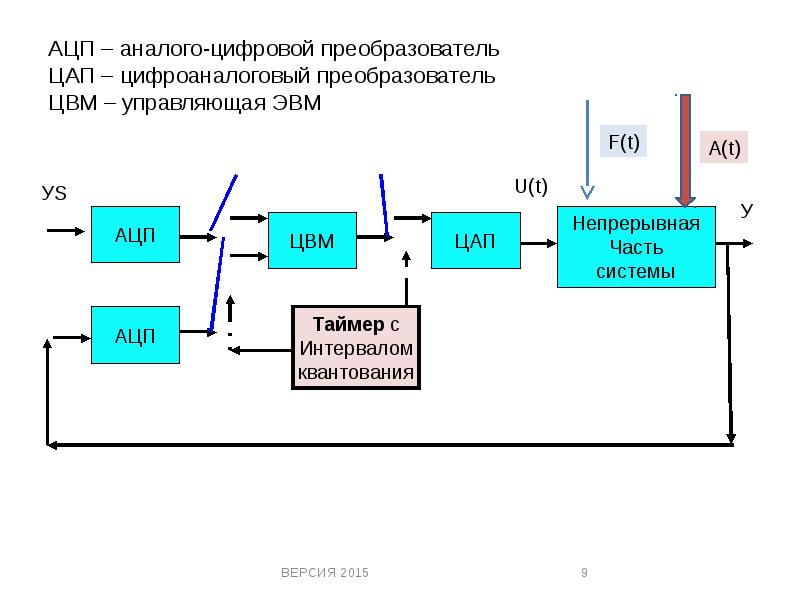
Содержание слайда: АЦП – аналого-цифровой преобразователь
ЦАП – цифроаналоговый преобразователь
ЦВМ – управляющая ЭВМ
№10 слайд
Содержание слайда: Цифровые системы управления имеют квантование по времени, что относит их к классу импульсных систем и квантованию по уровню, что делает их нелинейными.
Цифровые системы управления имеют квантование по времени, что относит их к классу импульсных систем и квантованию по уровню, что делает их нелинейными.
Существующие аналитические методы исследования данного класса систем для синтеза и анализа указанных систем малопригодны, поэтому основным методом исследования цифровых СУ является их моделирования на цифровых и аналогово-цифровых комплексах.
№11 слайд
Содержание слайда: При применении аналогово-цифровых комплексов, как правило, объект управления реализуется на аналоговой ЭВМ, а на ЦЭВМ реализуется управление ЭВМ с учетом квантования по времени.
При применении аналогово-цифровых комплексов, как правило, объект управления реализуется на аналоговой ЭВМ, а на ЦЭВМ реализуется управление ЭВМ с учетом квантования по времени.
При управлении СС объект или группа объектов обслуживаются ЦЭВМ по некоторой наперед заданной очереди.
Очередь обслуживания отдельных контуров может осуществляться по жесткой заранее заданной программе или по мере поступления заявок на обслуживание.
При жесткой программе обслуживания интервал квантования обычно постоянен, хотя он может быть различен в разных каналах обслуживания.
При обслуживании с приоритетом период дискретности является обычно некоторой случайной величиной с заданными математическим ожиданием.
№12 слайд

Содержание слайда: 2. Импульсные системы
Система импульсная линейная
Линейной системой импульсного регулирования называется такая САР, которая кроме звеньев описываемых обыкновенными линейными ДУ содержит импульсное звено, преобразующее непрерывное входное воздействие в равноотстоящие друг от друга по времени импульсы.
№13 слайд

Содержание слайда:
№14 слайд
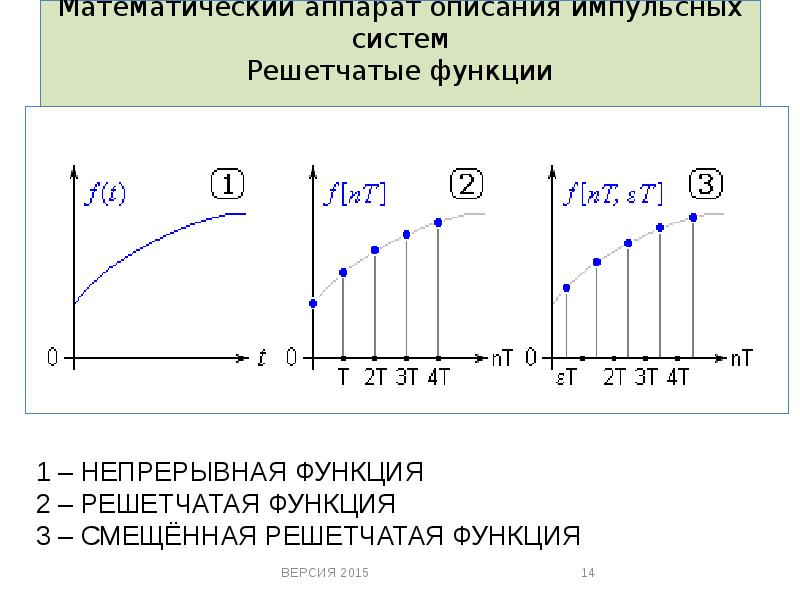
Содержание слайда: Математический аппарат описания импульсных систем
Решетчатые функции
№15 слайд
Содержание слайда: Решетчатые функции 2 определены только в дискретные моменты времени [nT] (сокращенно [n]), и формируются из непрерывных функций
f [nT] = f (t) при t=nT.
Рассматривают так же смещенные решетчатые функции (последовательность 3): f [n, e] = f (t) при t=(n+e)T,
где e - относительное смещение,
e принадлежит[0..1).
№16 слайд

Содержание слайда: Непрерывные функции, проходящие через дискреты заданной решетчатой функции, называют огибающими. Их бесконечно много.
№17 слайд
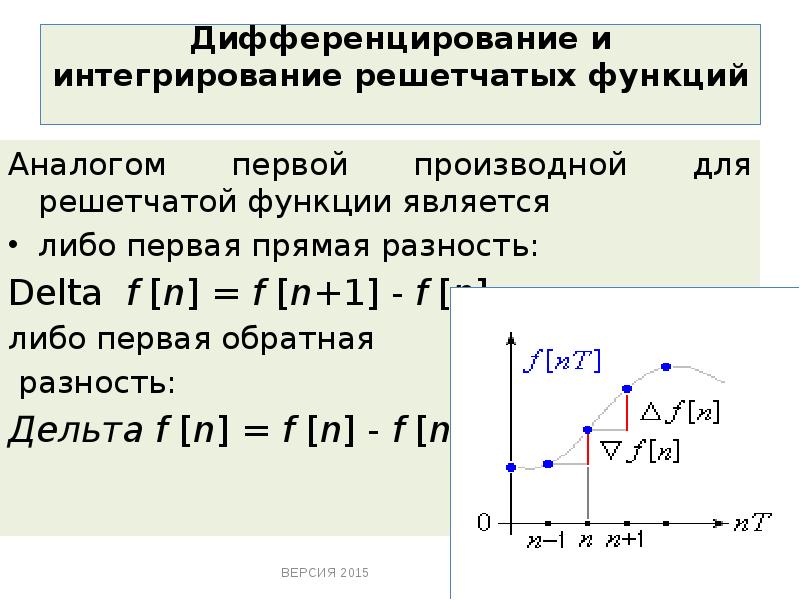
Содержание слайда: Дифференцирование и интегрирование решетчатых функций
Аналогом первой производной для решетчатой функции является
либо первая прямая разность:
Delta f [n] = f [n+1] - f [n],
либо первая обратная
разность:
Дельта f [n] = f [n] - f [n-1].
№18 слайд
Содержание слайда: 3. Алгоритм моделирования цифровых САУ с учетом квантования времени.
Рассмотрим методику моделирования цифровых систем управления с учетом формирования управления.
В простейшем случае за один шаг модельного времени примем:
параметр NT – интервал времени в шагах моделирования для расчета интервала квантования Tk,
j – счетчик для оценки временного интервала квантования.
№19 слайд
Содержание слайда: Модель состоит из двух частей:
Модель состоит из двух частей:
Модели формирования расчета управляющего воздействия с учетом квантования по времени.
Модели моделирования квазинепрерывной части системы.
№20 слайд

Содержание слайда:
№21 слайд

Содержание слайда:
№22 слайд
Содержание слайда: 4. Математические модели объектов и систем с дискретным управлением
Дополнительные пояснения для самостоятельного изучения
№23 слайд

Содержание слайда: ММ объектов и систем с дискретным управлением
Особенности квантования непрерывных сигналов
В дискретных системах управляющий сигнал подвергается квантованию, которое может быть по времени, по уровню или по уровню и времени. К системам с квантованием по времени относятся импульсные системы, в которых импульсный элемент срабатывает периодически и вначале каждого такого периода выдает сигнал, равный по величине непрерывному сигналу на входе.
Дискретные системы, в которых квантование сигналов происходит по времени и периодичность их не зависит от входного непрерывного сигнала, принято называть импульсными системами.
В зависимости от того, какой из параметров выходного импульса изменяется в зависимости от величины входного сигнала, говорят о типе модуляции входного сигнала.
№24 слайд

Содержание слайда: Особо выделяют амплитудно-импульсную модуляцию (АИМ) и широтно-импульсную (ШИМ).
Особо выделяют амплитудно-импульсную модуляцию (АИМ) и широтно-импульсную (ШИМ).
В первом случае управляемым параметром импульса является величина импульса, которая, как правило, равна значению входного сигнала в момент данной модуляции, а втором – ширина импульса при постоянной, как правило, амплитуде.
В случае АИМ длительность импульса может варьироваться теоретически от нуля до величины периода модуляции. Кроме типа модуляции выделяют ещё два рода модуляции: в случае первого рода управляемый параметр импульсов определяется величиной входного сигнала в момент переднего фронта импульса, а в случае второго рода он корректируется в течение всего времени существования каждого конкретного импульса.
№25 слайд

Содержание слайда: микропроцессорное управление
В настоящее время широко используется микропроцессорное управление.
Здесь изменение управляющего воздействия также происходит дискретно во времени, поскольку для формирования нового управляющего воздействия на объект необходимо время, связанное с преобразованием входного сигнала в цифровую форму (посредством аналого-цифрового преобразователя (АЦП)), его обработки в соответствии с заданным алгоритмом и последующим преобразованием цифрового кода в выходной сигнал (посредством цифро-аналогового преобразователя (ЦАП)).
Если микропроцессор обслуживает еще и другие устройства, то период этого цифрового управления может резко увеличиться. В интервалах времени между непосредственно моментами выдачи микропроцессором управляющей информации реальный сигнал управления обеспечивается посредством экстраполятора.
№26 слайд

Содержание слайда: На практике чаще всего используются экстраполяторы нулевого и первого порядков.
В экстраполяторах нулевого порядка уровень сигнала управления, который был сформирован микропроцессором, запоминается на весь период цикла Тц.
Это можно проследить на рис., где обозначено:
U(t) – входной аналоговый сигнал;
U[nTц] – сигнал в виде кратковременного импульса, который формирует микропроцессор (решетчатая функция);
U[nTц+ε] – реальное дискретное управление на входе объекта управления; ε временное смещение между решетками.
№27 слайд
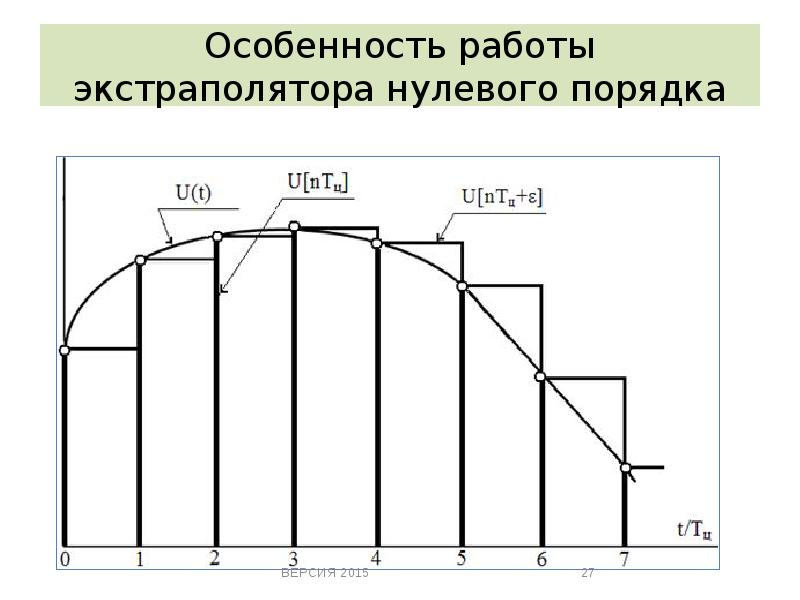
Содержание слайда: Особенность работы экстраполятора нулевого порядка
№28 слайд
Содержание слайда: В экстраполяторах первого порядка управляющий сигнал формируется с учетом первой производной входного сигнала U(t) на момент его фиксации АЦП и началом обработки микропроцессором.
Как видно из рис., графически сигнал U[nTц+ε] представляет собой касательные к графику U(t) в моменты фиксации решеток.
Необходимо также иметь представление, что описанная модель упрощена, так как между моментом формирования решёток U[nTц] и моментом реальной фиксации U(t) может быть существенное различие, обусловленное запаздыванием в формировании решеток.
№29 слайд

Содержание слайда: Особенность работы экстраполятора первого порядка
№30 слайд
Содержание слайда: Из рисунка также видно, что коррекция с помощью экстраполятора первого порядка не на всем временном интервале обеспечивает повышение адекватности цифровой модели аналоговой.
На начальном этапе видно существенное различие, здесь оказывают существенное влияние высшие производные входного сигнала.
Это значит необходимо либо повысить порядок экстраполятора, что может быть принципиально нереализуемо из-за отсутствия априорных сведений об U(t), либо уменьшить период циклов, что может потребовать автономного микропроцессора.
№31 слайд

Содержание слайда: К дискретным следует также отнести системы, в которых управление изменяется скачкообразно не вследствие временной модуляции, в связи с изменением входного сигнала по уровню.
К дискретным следует также отнести системы, в которых управление изменяется скачкообразно не вследствие временной модуляции, в связи с изменением входного сигнала по уровню.
Это, как известно, системы с релейным характером управления.
№32 слайд

Содержание слайда: Характеристика регулятора релейного типа
Обобщенная характеристика регулятора релейного типа представлена на рис. 03, где обозначено U – управление, создаваемое регулятором, которое может принимать три значения: U1, U2 и U3 = 0; σ – сигнал на входе регулятора;
А - зона нечувствительности регулятора;
А1 – гистерезис регулятора; стрелки на характеристике определяют порядок переключения регулятора.
Изменяя А и А1, можно получить все известные характеристики типовых регуляторов релейного типа.
При А1 = 0 имеем характеристику идеального трехпозиционного регулятора.
При А = 0 и А1 = 0 имеем характеристику идеального двухпозиционного регулятора.
При А = - А1 / 2, А1 > 0 имеем характеристику двухпозиционного гистерезисного регулятора.
Скачать все slide презентации Моделирование систем управления с управляющими микро ЭВМ одним архивом: