Презентация Организация системы ввода вывода онлайн
На нашем сайте вы можете скачать и просмотреть онлайн доклад-презентацию на тему Организация системы ввода вывода абсолютно бесплатно. Урок-презентация на эту тему содержит всего 45 слайдов. Все материалы созданы в программе PowerPoint и имеют формат ppt или же pptx. Материалы и темы для презентаций взяты из открытых источников и загружены их авторами, за качество и достоверность информации в них администрация сайта не отвечает, все права принадлежат их создателям. Если вы нашли то, что искали, отблагодарите авторов - поделитесь ссылкой в социальных сетях, а наш сайт добавьте в закладки.
Оцените презентацию от 1 до 5 баллов!
- Тип файла:ppt / pptx (powerpoint)
- Всего слайдов:45 слайдов
- Для класса:1,2,3,4,5,6,7,8,9,10,11
- Размер файла:5.54 MB
- Просмотров:96
- Скачиваний:2
- Автор:неизвестен
Слайды и текст к этой презентации:
№1 слайд
Содержание слайда: Организация системы ввода вывода
Логическая организация СВВ, аппаратная организация СВВ, контроллеры: параллельного В-В, последовательного В-В, ПДП. Микросхемы UART, PIO.
№2 слайд
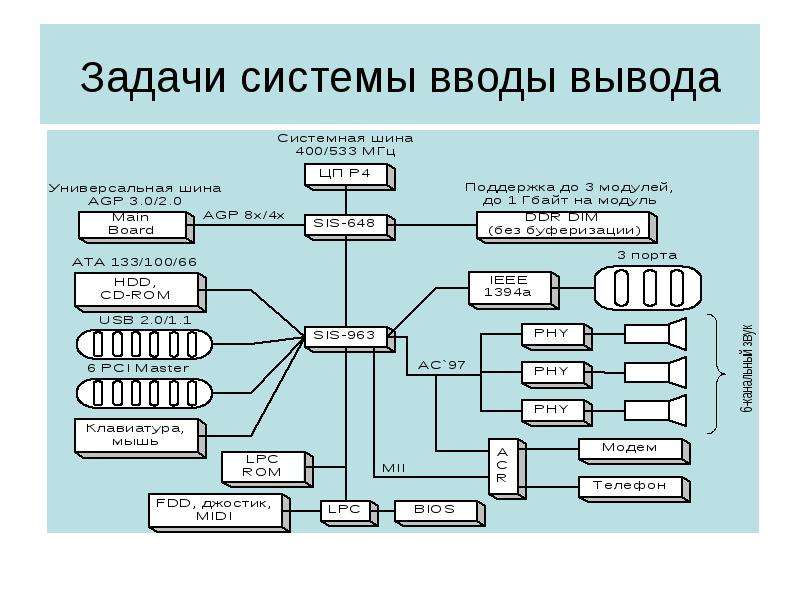
Содержание слайда: Задачи системы вводы вывода
№3 слайд
Содержание слайда: Глобальные задачи СВВ
Обеспечение максимальной производительности вычислительной системы.
Возможность изменения конфигурации периферийных устройств (ПУ).
Возможность модифицировать ПУ , не изменяя ядро системы.
№4 слайд

Содержание слайда: Элементы системы ввода -вывода
№5 слайд
Содержание слайда: Типы ввода – вывода процессора
Изолированный ввод-вывод.
Используются специальные команды МП: ввод, вывод, чтение состояния.
Передача данных производится между регистрами МП и ПУ.
Ввод – вывод с отображением на память.
Обращение ПУ как ячейке ОЗУ. В памяти резервируется ячейки для ПУ, имеющие регистр адреса, регистр состояния и регистр данных устройства.
№6 слайд
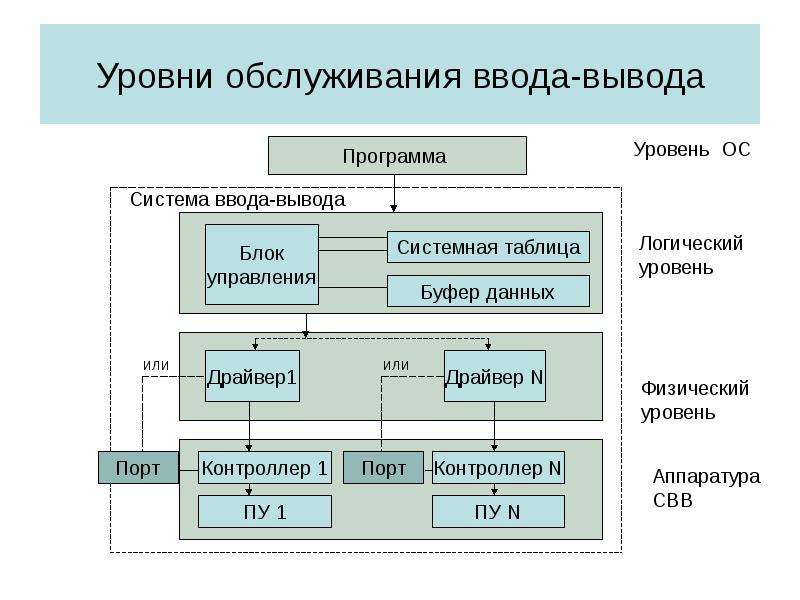
Содержание слайда: Уровни обслуживания ввода-вывода
№7 слайд
Содержание слайда: Функции драйверов
Проверка готовности контроллера и ПУ к обмену;
Формирование управляющих сигналов и данных для ПУ;
Определение действий при обнаружении ошибок;
Формирование сообщения о завершении операции с указанием успешности или неуспешности;
Передача управления на логический уровень.
№8 слайд
Содержание слайда: Способы организации СВВ
Программный.
На основе системы прерываний.
Прямой доступ к памяти.
Коммутаторный.
Без адресный «точка –точка».
Они могут комбинироваться при конкретной реализации системы.
№9 слайд
Содержание слайда: Алгоритм программного ввода-вывода под управлением процессора
1. Сформировать начальный адрес области обмена ОЗУ.
2. Занести длину передаваемого массива данных в регистр МП (Счетчик данных).
3. Выдать команду чтения из ВУ (Адрес ВУ, сигнал чтения на шину управления, данные записать в регистр МП).
4. Выдать команду записи данных в ОЗУ ( Адрес ячейки ОЗУ, сигнал записи в ОЗУ, Данные передать из регистра МП в ячейку памяти).
5. Модифицировать регистр, содержащий адрес ОЗУ.
6. Уменьшить счетчик данных на единицу.
7. Повторить все предыдущие шаги пока счетчик данных не обнулится.
№10 слайд
Содержание слайда: Система прерываний
Обработка прерывания.
Организация системы приоритетов через систему арбитража.
№11 слайд

Содержание слайда: Диаграмма прерывания
№12 слайд
Содержание слайда: Процедура обработки прерывания
Идентификация уровня запроса прерывания и источника.
Предоставление разрешения на прерывание ( или запрет).
Сохранение контекста прерываемой программы.
Выполнение программы прерывания.
Восстановление контекста прерванной программы.
Возврат к выполнению прерванной программы.
№13 слайд
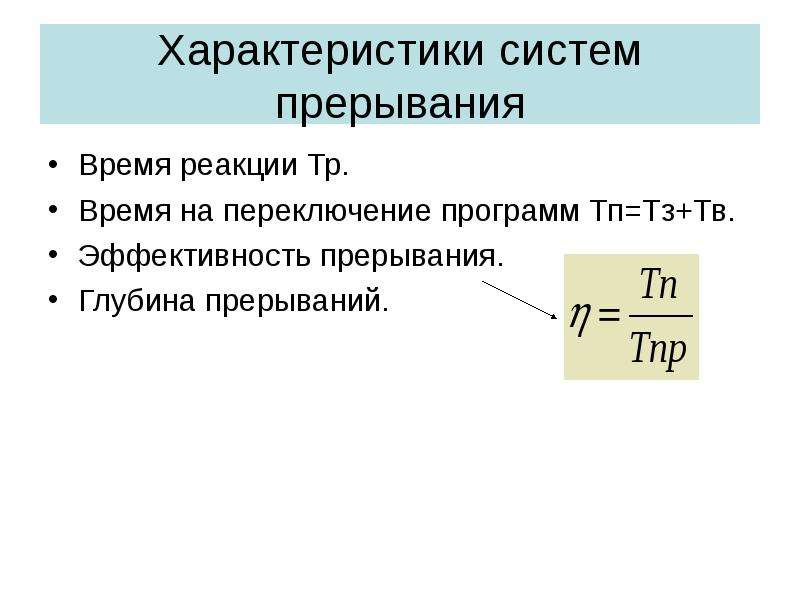
Содержание слайда: Характеристики систем прерывания
Время реакции Тр.
Время на переключение программ Тп=Тз+Тв.
Эффективность прерывания.
Глубина прерываний.
№14 слайд

Содержание слайда: Глубина прерывания
№15 слайд

Содержание слайда: СВВ с использованием системы прерываний
№16 слайд
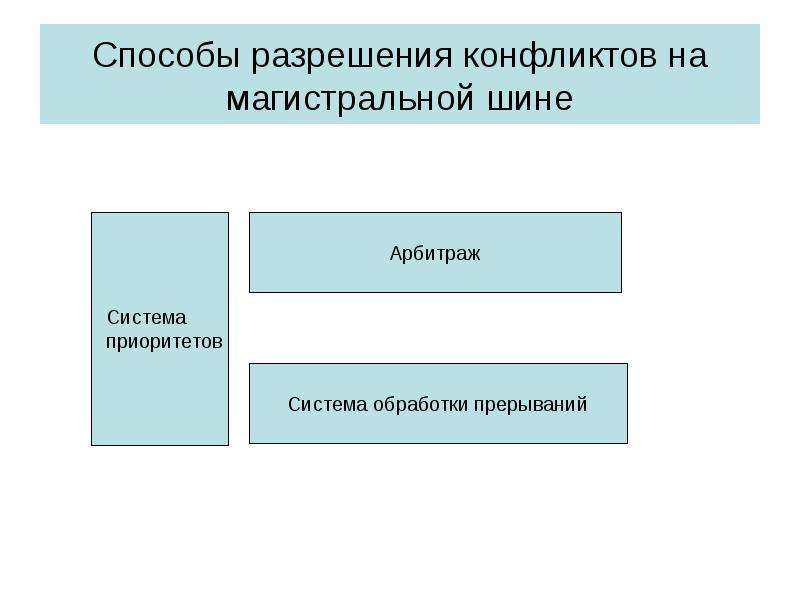
Содержание слайда: Способы разрешения конфликтов на магистральной шине
№17 слайд
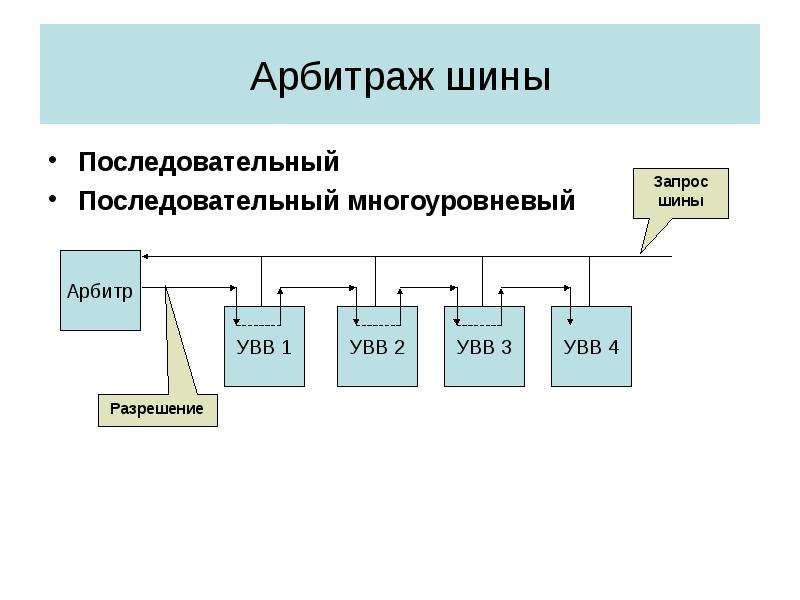
Содержание слайда: Арбитраж шины
Последовательный
Последовательный многоуровневый
№18 слайд
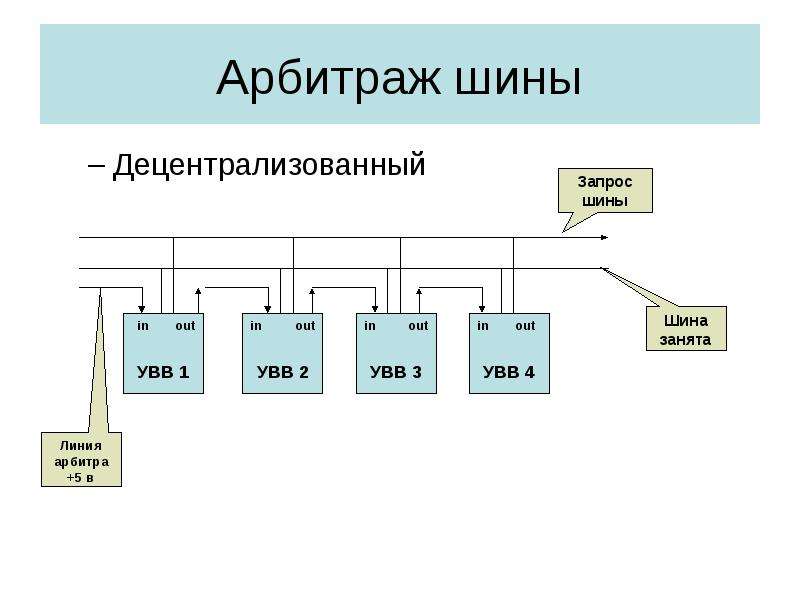
Содержание слайда: Арбитраж шины
Децентрализованный
№19 слайд
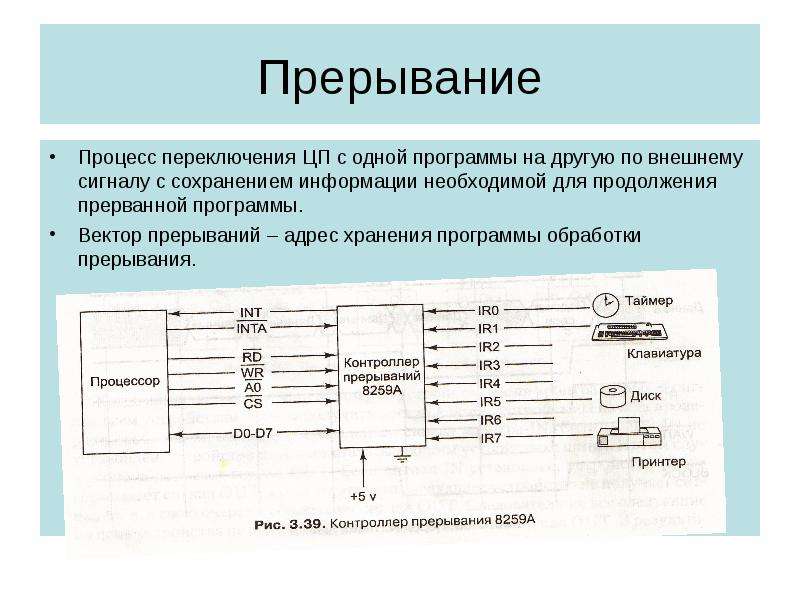
Содержание слайда: Прерывание
Процесс переключения ЦП с одной программы на другую по внешнему сигналу с сохранением информации необходимой для продолжения прерванной программы.
Вектор прерываний – адрес хранения программы обработки прерывания.
№20 слайд
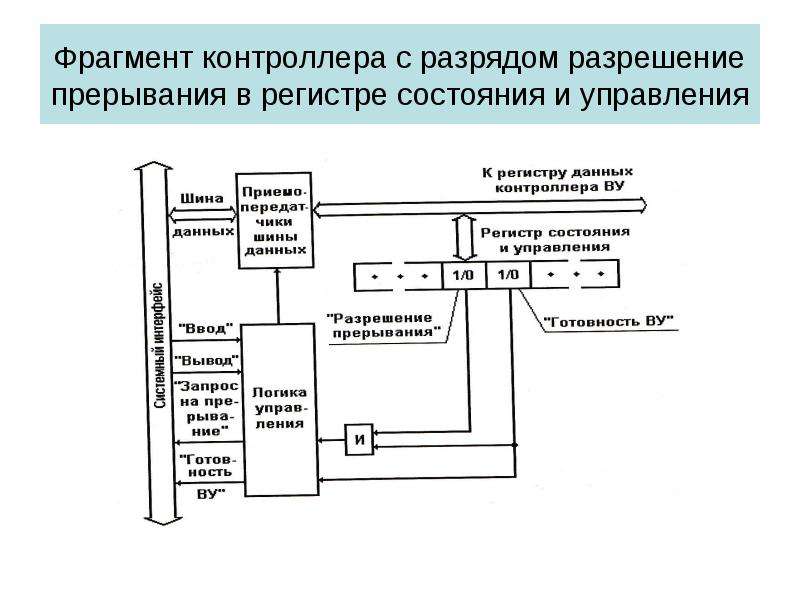
Содержание слайда: Фрагмент контроллера с разрядом разрешение
прерывания в регистре состояния и управления
№21 слайд

Содержание слайда: Вектор прерываний
№22 слайд

Содержание слайда: Контроллер прерываний Intel 8259A
RGI – регистр запросов на прерывание.
PRB – схема арбитр.
ISR - регистр обслуживаемых прерываний.
RGM – регистр маскирования прерываний.
BU – схема управления.
BD – буфер данных выдает на шину вектор прерывания.
CMP – схема организации каскада.
RWBU – блок управления записью, чтением.
№23 слайд
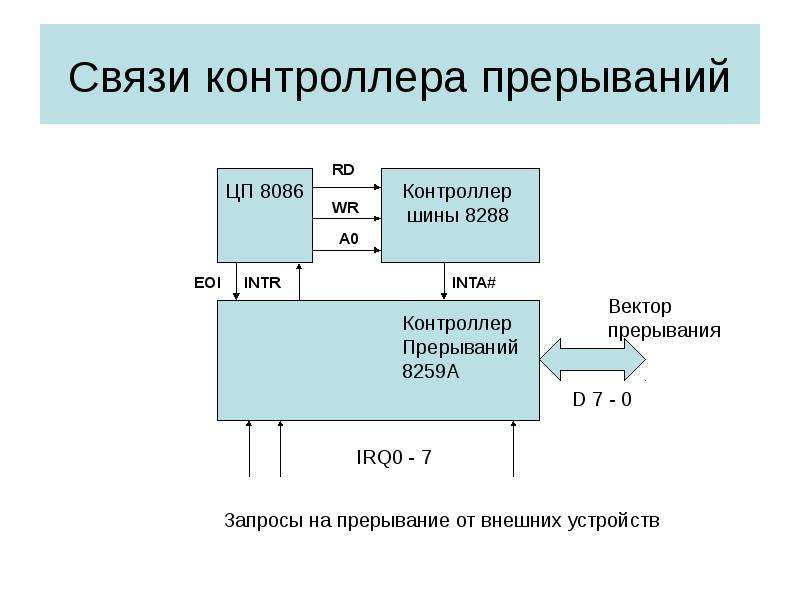
Содержание слайда: Связи контроллера прерываний
№24 слайд
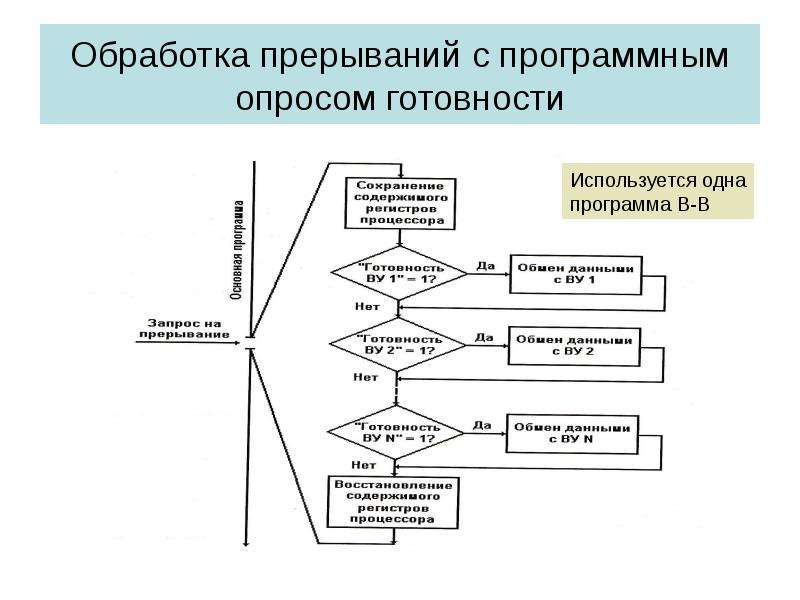
Содержание слайда: Обработка прерываний с программным опросом готовности
№25 слайд
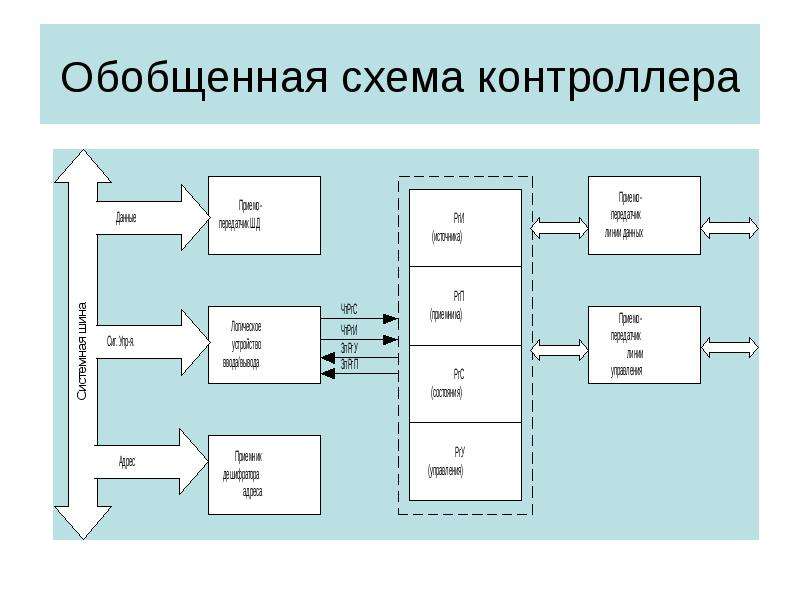
Содержание слайда: Обобщенная схема контроллера
№26 слайд
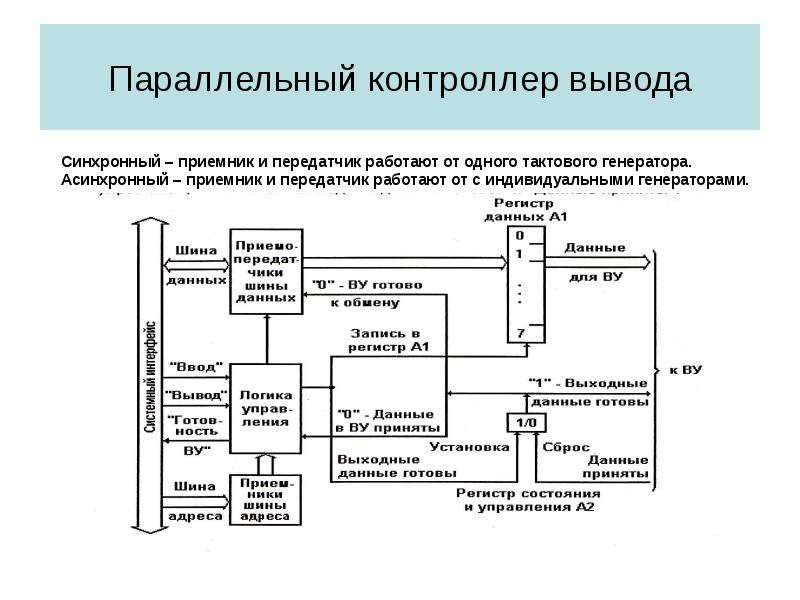
Содержание слайда: Параллельный контроллер вывода
№27 слайд
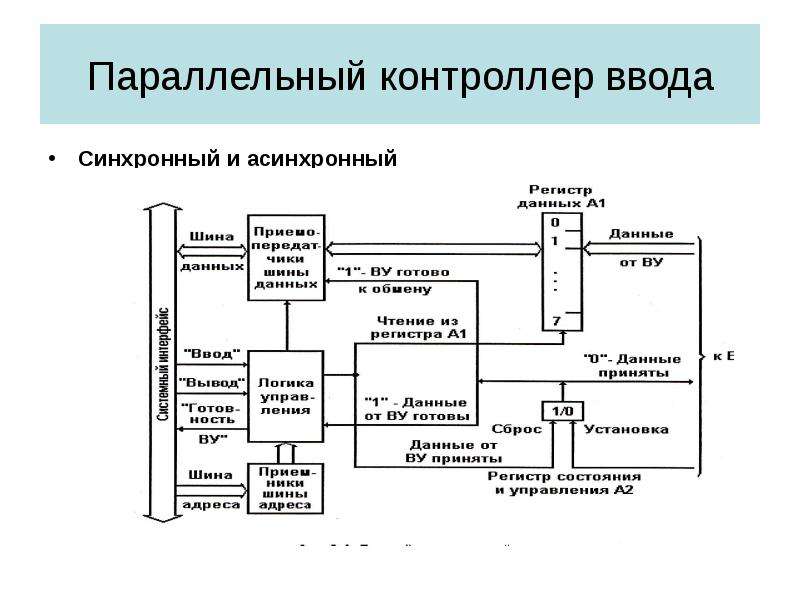
Содержание слайда: Параллельный контроллер ввода
Синхронный и асинхронный
№28 слайд
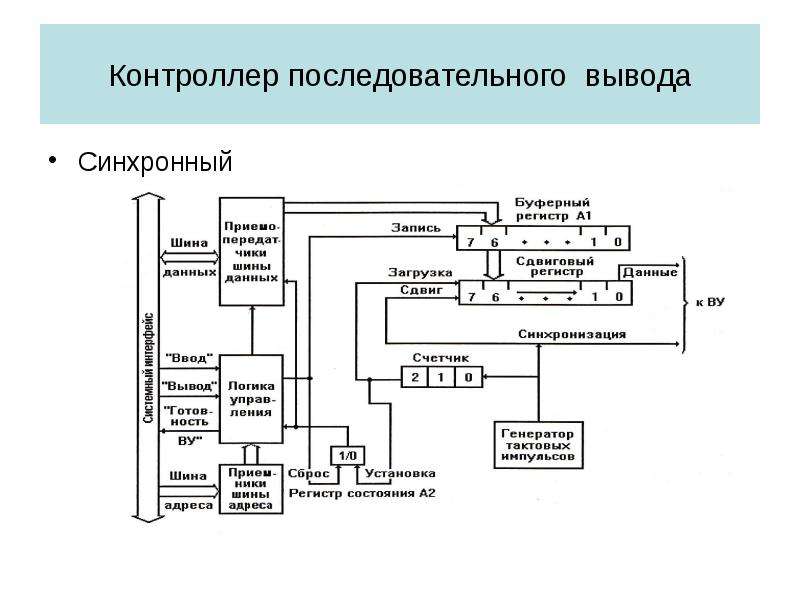
Содержание слайда: Контроллер последовательного вывода
Синхронный
№29 слайд
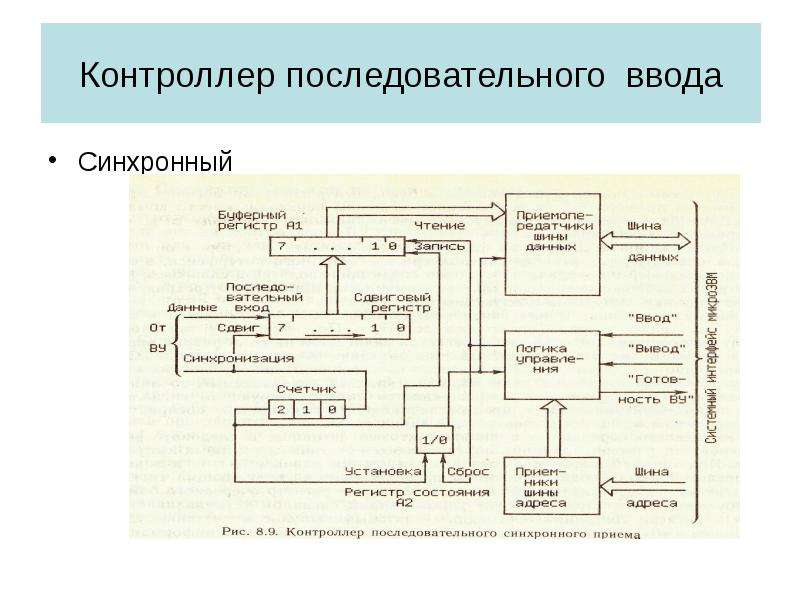
Содержание слайда: Контроллер последовательного ввода
Синхронный
№30 слайд
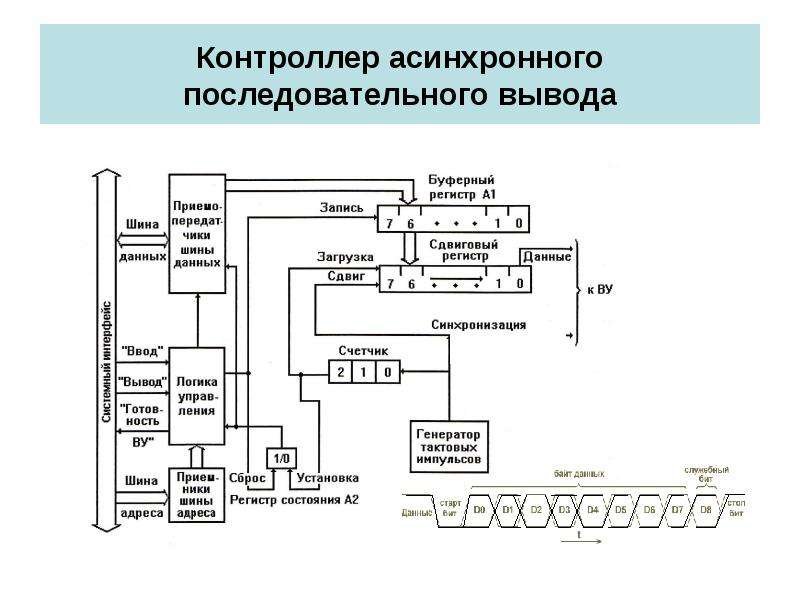
Содержание слайда: Контроллер асинхронного последовательного вывода
№31 слайд
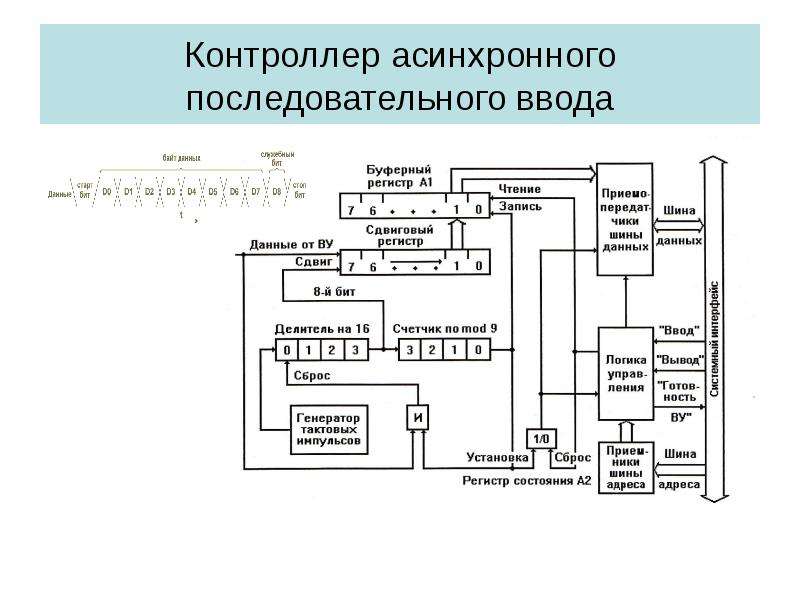
Содержание слайда: Контроллер асинхронного последовательного ввода
№32 слайд
Содержание слайда: Контроллер прямого доступа к памяти
Контроллер ПДП может быть реализован как отдельное устройство, либо встраиваться в контроллеры ВУ.
Режимы работы ПДП:
- с захватом цикла – используются циклы, в которых МП не работает с памятью. Обмен байтом, словом; Медленный, но не требует применения специальных устройств.
- с захватом цикла и отключение МП от системной шины. Приостановка выполнения очередной команды процессора сигналом ТПДП и обмен блоком данных между ВУ и памятью. Требуется выполнение программы загрузки регистров контроллера ПДП процессором адресом и размером загружаемого блока.
- с блокировкой процессора.
№33 слайд
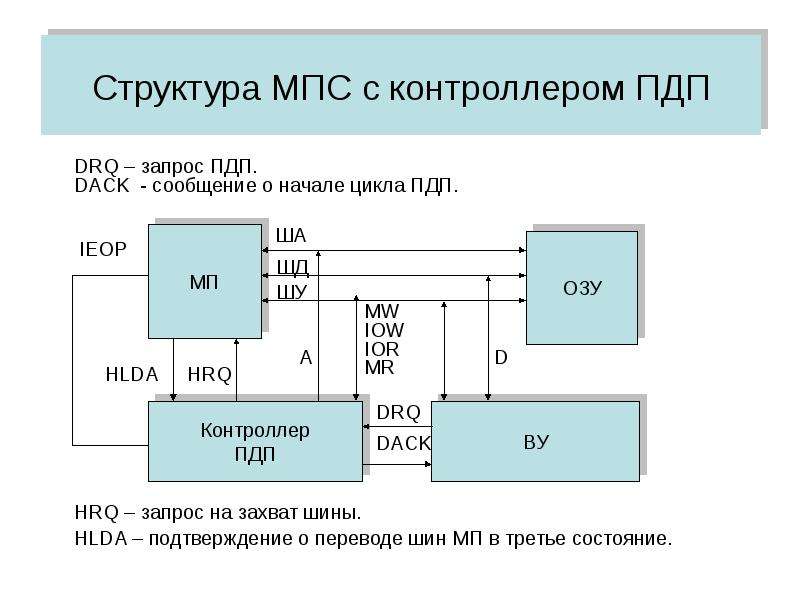
Содержание слайда: Структура МПС с контроллером ПДП
№34 слайд
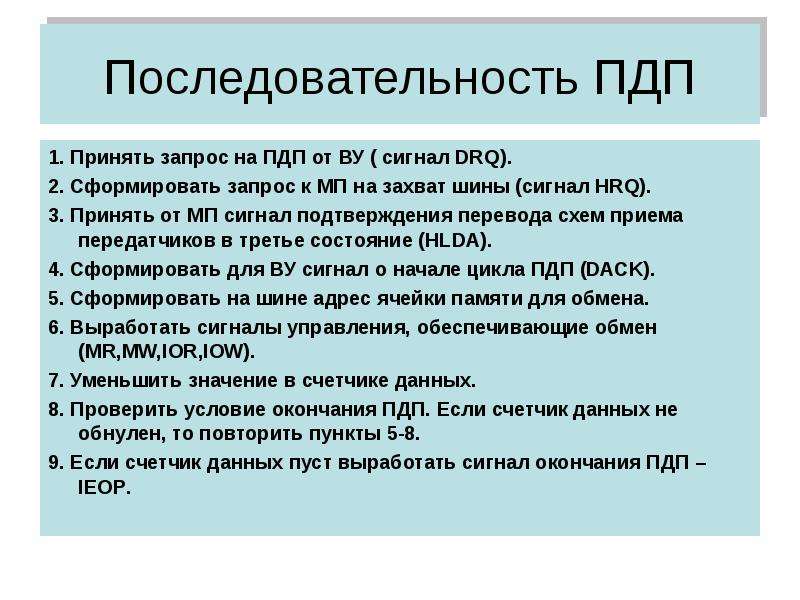
Содержание слайда: Последовательность ПДП
1. Принять запрос на ПДП от ВУ ( сигнал DRQ).
2. Сформировать запрос к МП на захват шины (сигнал HRQ).
3. Принять от МП сигнал подтверждения перевода схем приема передатчиков в третье состояние (HLDA).
4. Сформировать для ВУ сигнал о начале цикла ПДП (DACK).
5. Сформировать на шине адрес ячейки памяти для обмена.
6. Выработать сигналы управления, обеспечивающие обмен (MR,MW,IOR,IOW).
7. Уменьшить значение в счетчике данных.
8. Проверить условие окончания ПДП. Если счетчик данных не обнулен, то повторить пункты 5-8.
9. Если счетчик данных пуст выработать сигнал окончания ПДП – IEOP.
№35 слайд
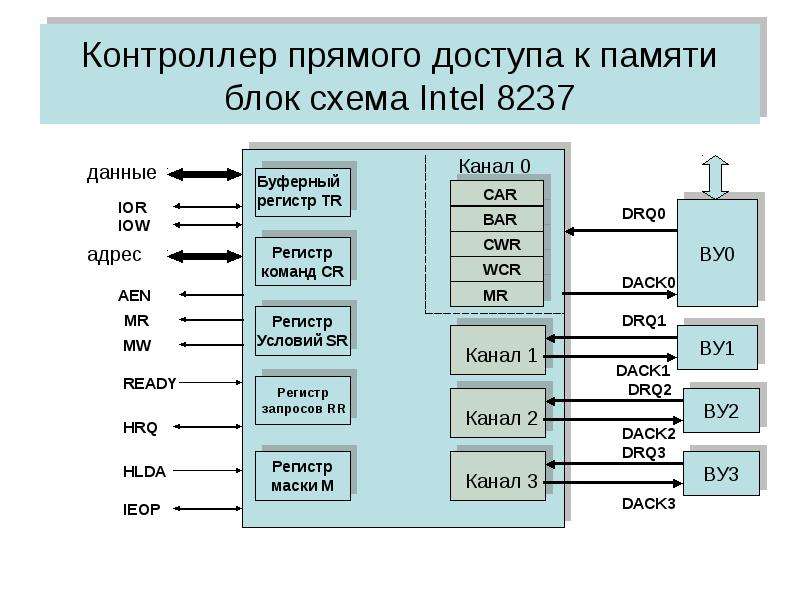
Содержание слайда: Контроллер прямого доступа к памяти
блок схема Intel 8237
№36 слайд
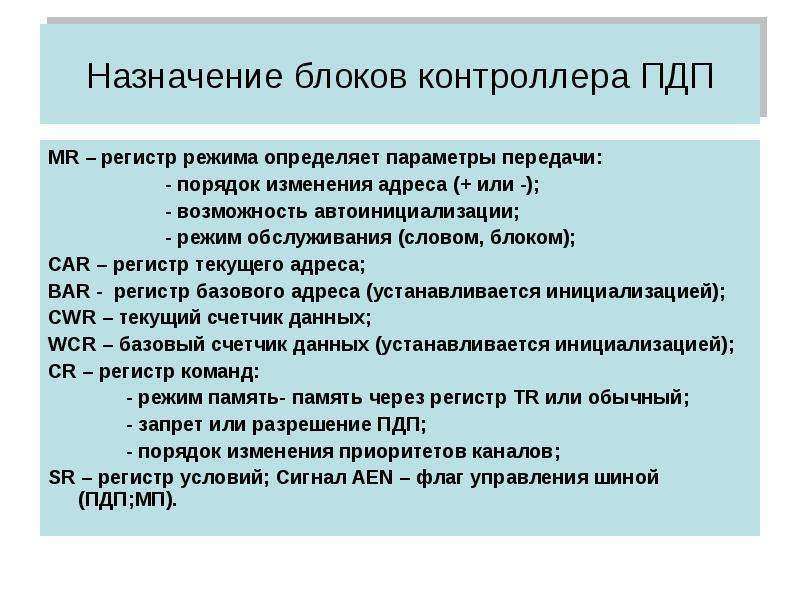
Содержание слайда: Назначение блоков контроллера ПДП
MR – регистр режима определяет параметры передачи:
- порядок изменения адреса (+ или -);
- возможность автоинициализации;
- режим обслуживания (словом, блоком);
CAR – регистр текущего адреса;
BAR - регистр базового адреса (устанавливается инициализацией);
CWR – текущий счетчик данных;
WCR – базовый счетчик данных (устанавливается инициализацией);
CR – регистр команд:
- режим память- память через регистр TR или обычный;
- запрет или разрешение ПДП;
- порядок изменения приоритетов каналов;
SR – регистр условий; Сигнал AEN – флаг управления шиной (ПДП;МП).
№37 слайд
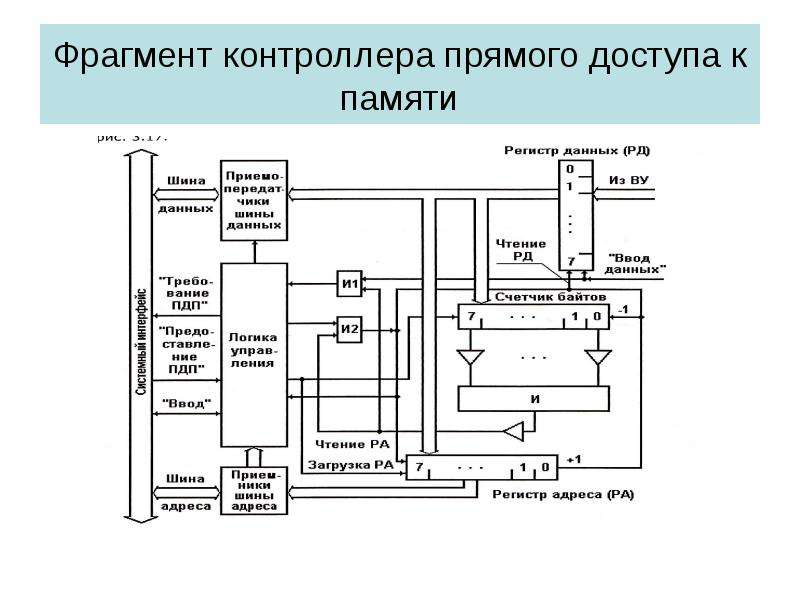
Содержание слайда: Фрагмент контроллера прямого доступа к памяти
№38 слайд
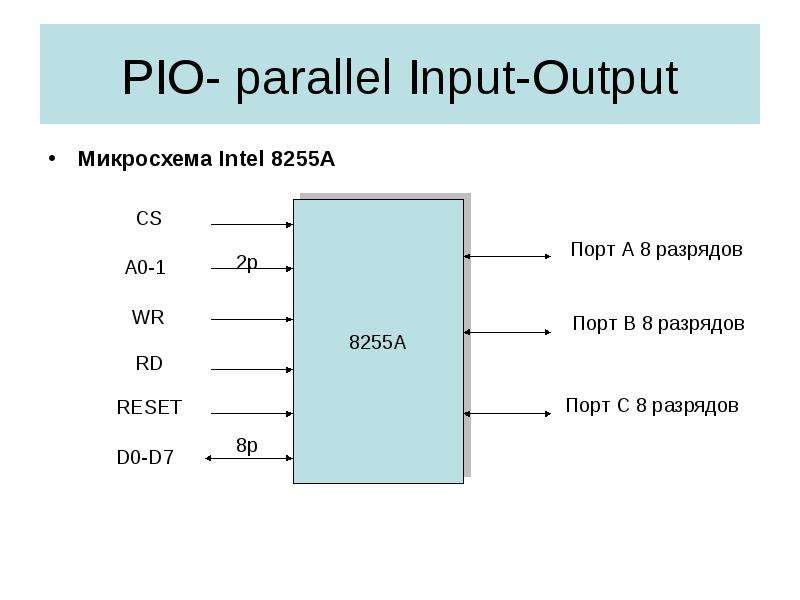
Содержание слайда: PIO- parallel Input-Output
Микросхема Intel 8255A
№39 слайд
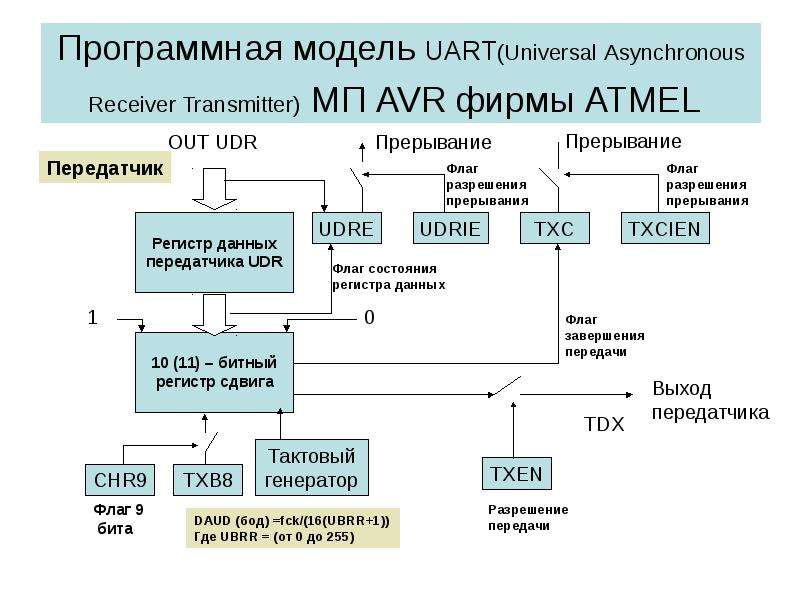
Содержание слайда: Программная модель UART(Universal Asynchronous Receiver Transmitter) МП AVR фирмы ATMEL
№40 слайд
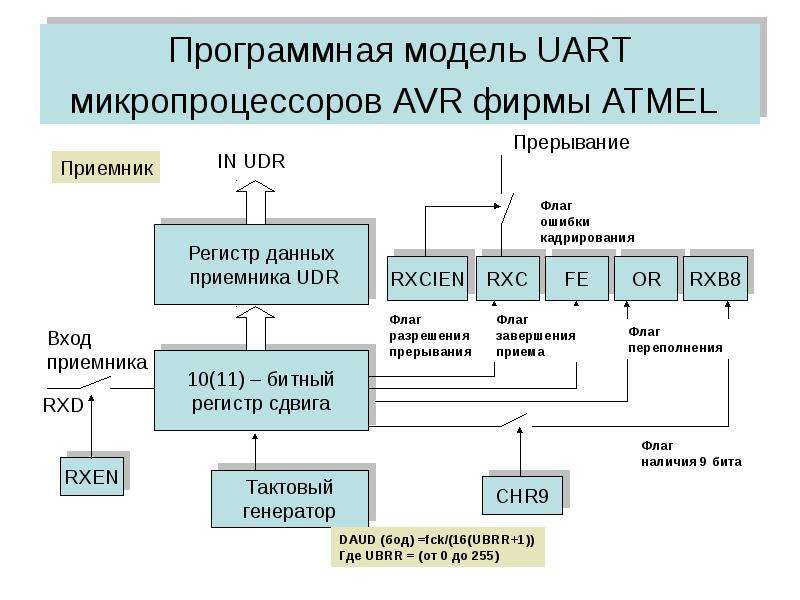
Содержание слайда: Программная модель UART микропроцессоров AVR фирмы ATMEL
№41 слайд

Содержание слайда:
№42 слайд
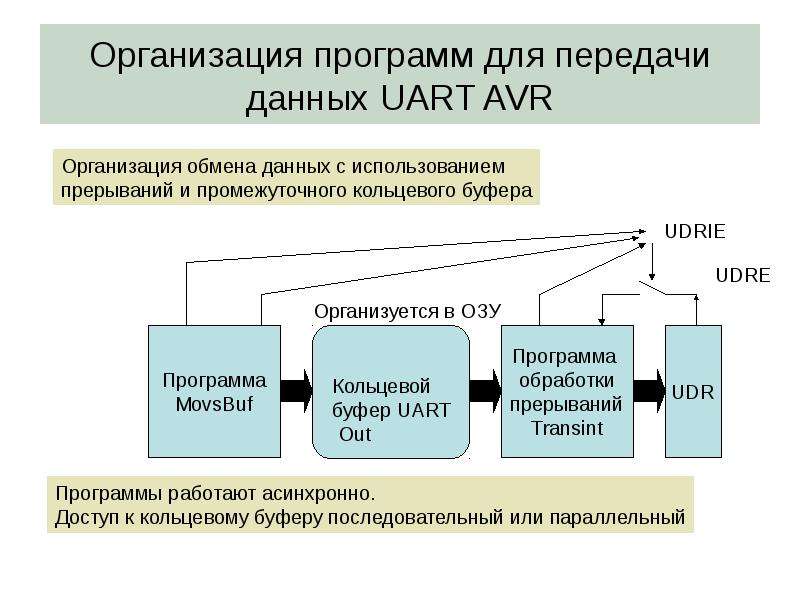
Содержание слайда: Организация программ для передачи данных UART AVR
№43 слайд
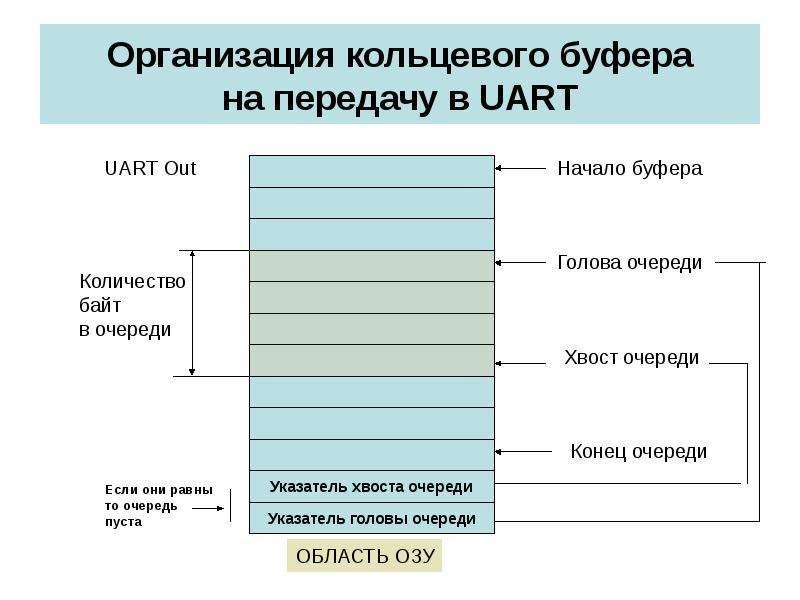
Содержание слайда: Организация кольцевого буфера
на передачу в UART
№44 слайд
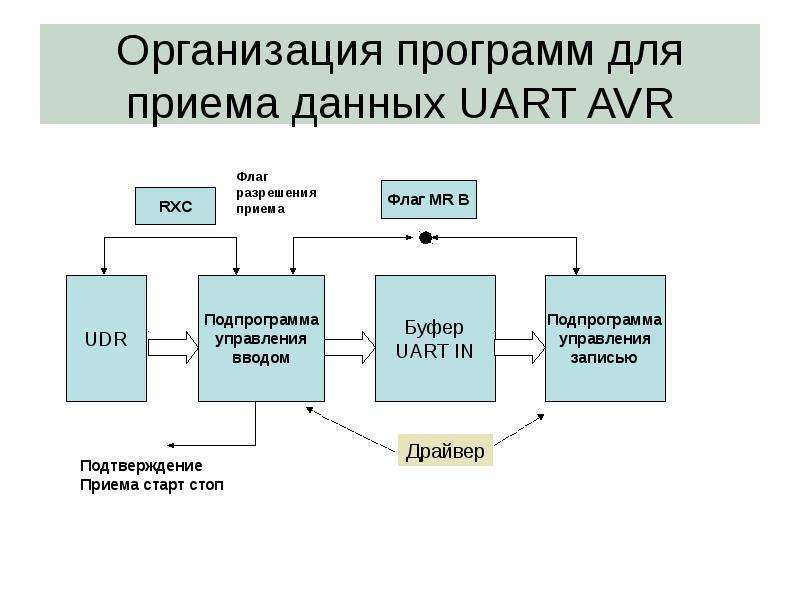
Содержание слайда: Организация программ для приема данных UART AVR
№45 слайд
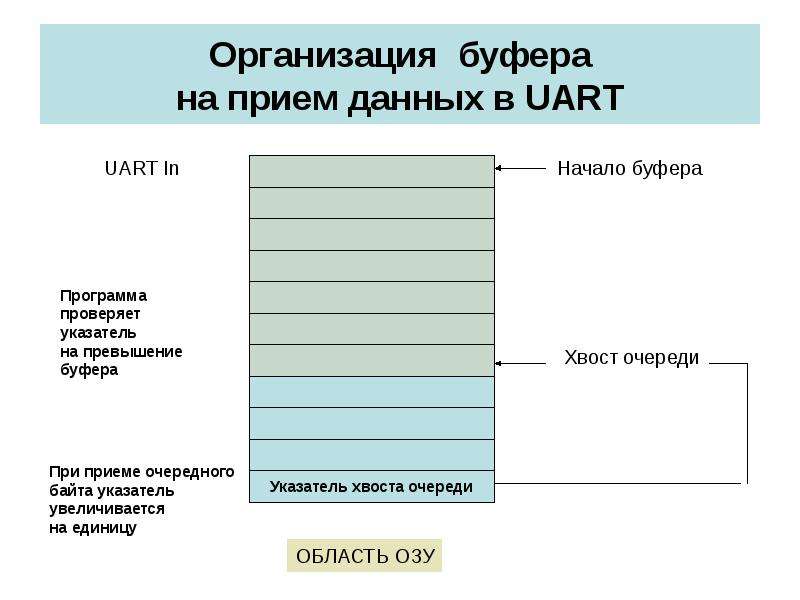
Содержание слайда: Организация буфера
на прием данных в UART
Скачать все slide презентации Организация системы ввода вывода одним архивом: