Презентация Типовые линейные алгоритмы регулирования; нелинейные позиционные алгоритмы регулирования онлайн
На нашем сайте вы можете скачать и просмотреть онлайн доклад-презентацию на тему Типовые линейные алгоритмы регулирования; нелинейные позиционные алгоритмы регулирования абсолютно бесплатно. Урок-презентация на эту тему содержит всего 13 слайдов. Все материалы созданы в программе PowerPoint и имеют формат ppt или же pptx. Материалы и темы для презентаций взяты из открытых источников и загружены их авторами, за качество и достоверность информации в них администрация сайта не отвечает, все права принадлежат их создателям. Если вы нашли то, что искали, отблагодарите авторов - поделитесь ссылкой в социальных сетях, а наш сайт добавьте в закладки.
Оцените презентацию от 1 до 5 баллов!
- Тип файла:ppt / pptx (powerpoint)
- Всего слайдов:13 слайдов
- Для класса:1,2,3,4,5,6,7,8,9,10,11
- Размер файла:585.62 kB
- Просмотров:55
- Скачиваний:1
- Автор:неизвестен
Слайды и текст к этой презентации:
№1 слайд
Содержание слайда: Лекция №3
Типовые линейные алгоритмы регулирования;
нелинейные позиционные алгоритмырегулирования;
№2 слайд

Содержание слайда: В зависимости от свойств ОУ, технологических требований и возможных изменениях возмущающих воздействий применяются САР прерывистого и непрерывного действия
В зависимости от свойств ОУ, технологических требований и возможных изменениях возмущающих воздействий применяются САР прерывистого и непрерывного действия
Основной характеристикой регyляторов является функциональная зависимость между отклонением регyлируемой величины и перемещением регyлирующего органа. Эта зависимость называется законом регyлuрования по которому различают основные виды регyляторов.
позиционный
пропорциональный
интегральный
пропорционально-интегральный
пропорционально-интегрально-дифференциальный
№3 слайд

Содержание слайда: Системы регулирования прерывистого действия
В САР прерывистого действия применяются регyляторы, рабочий орган которых может принимать два фиксированных положения (позиции), соответствующих определенному отклонению регyлируемой величины, поэтому эти регyляторы называют позиционными.
№4 слайд

Содержание слайда: Системы регулирования непрерывного действия
В САР данного типа применяют регyляторы у которых при получении сигнала об отклонении регyлируемой величины регyлирующий орган перемещается плавно и непрерывно до момента установления заданного значения регyлируемой величины.
Пропорциональным П- регyлятором называется регyлятор, у которого перемещение регyлирующего органа пропорционально отклонению регyлируемой величины от ее заданного значения.
Уравнение регyлятора имеет вид
U= кр∆х,
где u - регyлирующее воздействие
регyлятора; кр – коэффициент
передачи (коэффициент усиления)
регулятора; ∆х -отклонение
регyлируемой величины от заданного
значения.
№5 слайд

Содержание слайда: Чтобы моделировать пропорциональный закон регулирования, оператор непрерывно устанавливал бы регулирующий клапан в положение, отвечающее произошедшему на данный момент изменению уровня. Т.е. если уровень понизился немного, оператор откроет клапан немного; если уровень понизился еще больше, оператор увеличит степень открытия клапана.
Чтобы моделировать пропорциональный закон регулирования, оператор непрерывно устанавливал бы регулирующий клапан в положение, отвечающее произошедшему на данный момент изменению уровня. Т.е. если уровень понизился немного, оператор откроет клапан немного; если уровень понизился еще больше, оператор увеличит степень открытия клапана.
Когда уровень в резервуаре изменяется, оператор открывает или закрывает клапан пропорционально этим изменениям. Когда изменения уровня прекращаются, оператор останавливает позиционирование клапана. При этом уровень установится на некоторой отметке, но это может не быть заданное значение уровня. Это означает, что при пропорциональном регулировании может быть смещение регулируемой переменной процесса или ошибка регулирования.
№6 слайд

Содержание слайда: Интегральным И-регyлятором называется регyлятор, у которого регулирующее воздействие пропорционaльно интегралу отклонения регyлируемой величины.
Интегральным И-регyлятором называется регyлятор, у которого регулирующее воздействие пропорционaльно интегралу отклонения регyлируемой величины.
Уравнение И-регyлятора имеет вид
№7 слайд
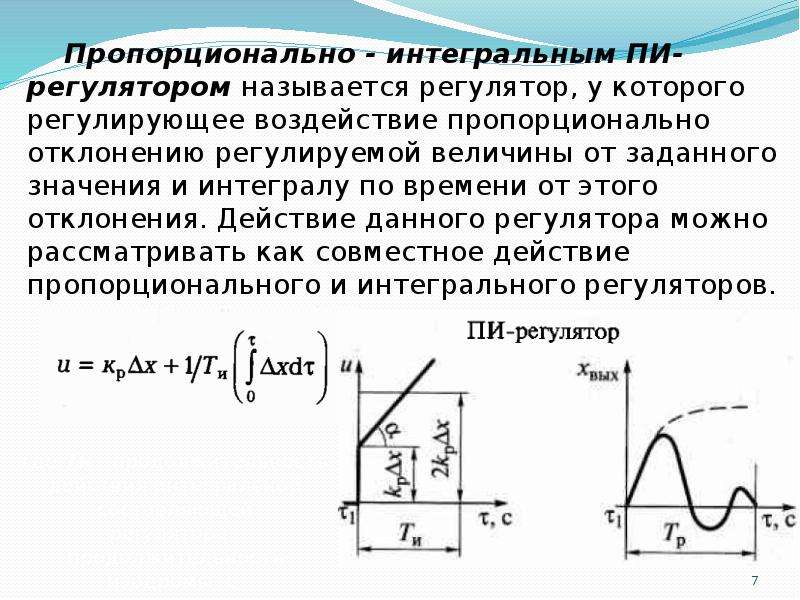
Содержание слайда: Пропорционально - интегральным ПИ- регулятором называется регyлятор, у которого регyлирующее воздействие пропорционально отклонению регyлируемой величины от заданного значения и интегрaлу по времени от этого отклонения. Действие данного регyлятора можно рассматривать как совместное действие пропорционального и интегрального регуляторов.
Пропорционально - интегральным ПИ- регулятором называется регyлятор, у которого регyлирующее воздействие пропорционально отклонению регyлируемой величины от заданного значения и интегрaлу по времени от этого отклонения. Действие данного регyлятора можно рассматривать как совместное действие пропорционального и интегрального регуляторов.
№8 слайд

Содержание слайда: Пропорционально – интегрально -дифференциальным регyлятором называется регyлятор, у которого регyлирующее воздействие пропорционально отклонению регyлируемой величины от задания, интегралу и скорости этого отклонения.
Пропорционально – интегрально -дифференциальным регyлятором называется регyлятор, у которого регyлирующее воздействие пропорционально отклонению регyлируемой величины от задания, интегралу и скорости этого отклонения.
Уравнение регулятора имеет вид
№9 слайд

Содержание слайда: Преобразование Лапласа
Преобразование Лапласа
Одна из первых задач, которая была поставлена в теории управления – вычисление выхода системы при известном входе. Для этого нужно решать дифференциальные уравнения, классический метод решения которых имеет следующие существенные недостатки:
ограниченность применения
громоздкость при анализе переходных процессов цепей более второго порядка.
Чтобы упростить процедуру расчетов, математики придумали операторный метод, основанный на применении преобразования Лапласа, который позволил заменить решение дифференциальных уравнений алгебраическими вычислениями.
Операторный метод не обладает физической наглядностью в силу математической формализации, но значительно упрощает расчеты.
Сущность операторного метода заключается в том, что расчет переходного процесса переносится из области функций действительной переменной (времени t) в область функций комплексного переменного р. При этом операции дифференцирования и интегрирования функций времени заменяются соответствующими операциями умножения и деления функций комплексного переменного на оператор p. Это существенно упрощает расчет, так как сводит систему дифференциальных уравнений к системе алгебраической.
№10 слайд
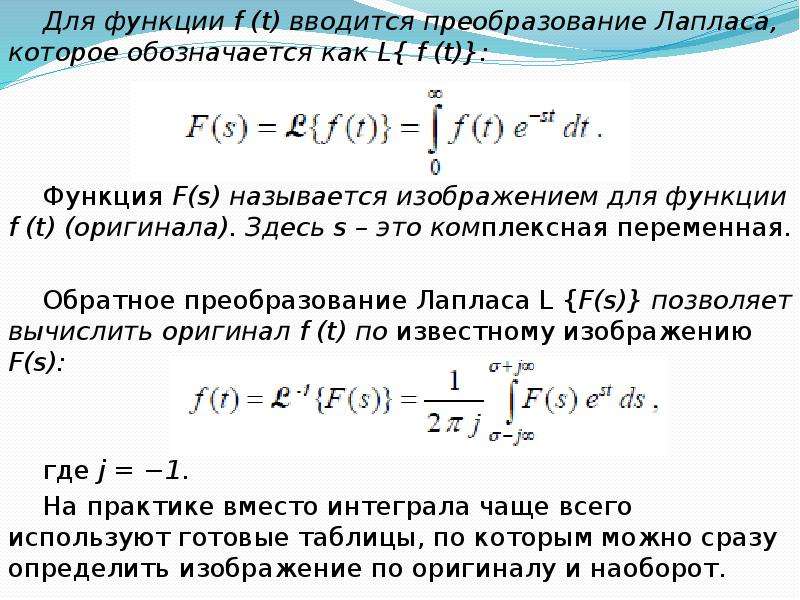
Содержание слайда: Для функции f (t) вводится преобразование Лапласа, которое обозначается как L{ f (t)}:
Для функции f (t) вводится преобразование Лапласа, которое обозначается как L{ f (t)}:
Функция F(s) называется изображением для функции f (t) (оригинала). Здесь s – это комплексная переменная.
Обратное преобразование Лапласа L {F(s)} позволяет вычислить оригинал f (t) по известному изображению F(s):
где j = −1.
На практике вместо интеграла чаще всего используют готовые таблицы, по которым можно сразу определить изображение по оригиналу и наоборот.
№11 слайд

Содержание слайда:
№12 слайд
Содержание слайда: Передаточная функция
Передаточная функция
Преобразование дифференциального уравнения по Лапласу дает возможность ввести одно из фундаментальных понятий — понятие передаточной функции
Передаточной функцией линейной стационарной динамической системы называют отношение преобразования Лапласа величины на выходе системы к преобразованию Лапласа воздействия на ее входе при нулевых начальных условиях, т.е. передаточная функция представляет собой, по существу, сокращенную запись дифференциального уравнения автоматической системы.
№13 слайд
Содержание слайда: Частотные характеристики линейных САУ
Частотные характеристики линейных САУ
Частотные характеристики линейных САУ рассчитываются через передаточные функции: если W(p) – передаточная функция, то W(j��)– частотная характеристика (ЧХ), получаемая из передаточной функции путём замены в ней p на j�� .ЧХ как комплексное число может быть представлено в показательной и алгебраической формах.
Показательная форма:
Эта запись позволяет найти еще две важнейшие характеристики: АЧХ и ФЧХ:
A(ω) – амплитудо-частотная характеристика (АЧХ);
W(jω) – фазо-частотная характеристика (ФЧХ).
Скачать все slide презентации Типовые линейные алгоритмы регулирования; нелинейные позиционные алгоритмы регулирования одним архивом: