Презентация Синтез и анализ систем автоматического управления следящих систем на судах онлайн
На нашем сайте вы можете скачать и просмотреть онлайн доклад-презентацию на тему Синтез и анализ систем автоматического управления следящих систем на судах абсолютно бесплатно. Урок-презентация на эту тему содержит всего 15 слайдов. Все материалы созданы в программе PowerPoint и имеют формат ppt или же pptx. Материалы и темы для презентаций взяты из открытых источников и загружены их авторами, за качество и достоверность информации в них администрация сайта не отвечает, все права принадлежат их создателям. Если вы нашли то, что искали, отблагодарите авторов - поделитесь ссылкой в социальных сетях, а наш сайт добавьте в закладки.
Оцените презентацию от 1 до 5 баллов!
- Тип файла:ppt / pptx (powerpoint)
- Всего слайдов:15 слайдов
- Для класса:1,2,3,4,5,6,7,8,9,10,11
- Размер файла:1.29 MB
- Просмотров:117
- Скачиваний:2
- Автор:неизвестен
Слайды и текст к этой презентации:
№1 слайд
Содержание слайда: Презентация курсовой работы
по дисциплине: « Теория автоматического управления»
Курсанта группы СЭ-31
Каграманова Р. В.
№2 слайд
Содержание слайда: СИНТЕЗ И АНАЛИЗ САУ СЛЕДЯЩИХ СИСТЕМ
№3 слайд
Содержание слайда: Целью данной курсовой работы является приобретение навыков составления и преобразования структурных схем, синтеза систем автоматического управления и анализа работы систем управления.
Целью данной курсовой работы является приобретение навыков составления и преобразования структурных схем, синтеза систем автоматического управления и анализа работы систем управления.
Задания построены на примере следящих электрических систем, которые применяются во многих судовых системах.
№4 слайд
Содержание слайда: Необходимость следящих электрических систем на судах
Морская интеллектуальная система (МИС) стабилизации качки судна (СКС) с помощью перекладки руля предназначена для уменьшения качки судна (вызываемую воздействием волн ). Служат для повышения эффективности работы экипажа и обеспечения комфорта пассажирам. Существует способ использования руля для стабилизации качки наряду с обеспечением заданного курса. Однако использования руля одновременно для обеспечения курса и уменьшения качки нетривиально, потому что доступен только один исполнительный механизм. Важная проблема еще и заключается в том, что механизм руля ограничен по амплитуде и скорости. Это и послужило основаниям проведения настоящих исследований по разработанной МИС СКС.
№5 слайд

Содержание слайда: Рисунок 1 - Функциональная схемы следящей системы
Рисунок 1 - Функциональная схемы следящей системы
№6 слайд

Содержание слайда: 1.Описание СС с помощью ДУ
№7 слайд
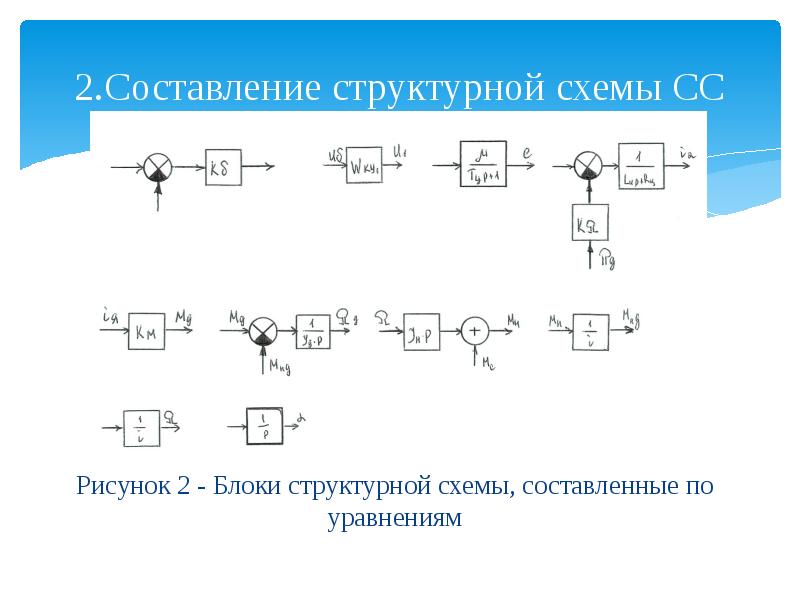
Содержание слайда: 2.Составление структурной схемы СС
Рисунок 2 - Блоки структурной схемы, составленные по уравнениям
№8 слайд
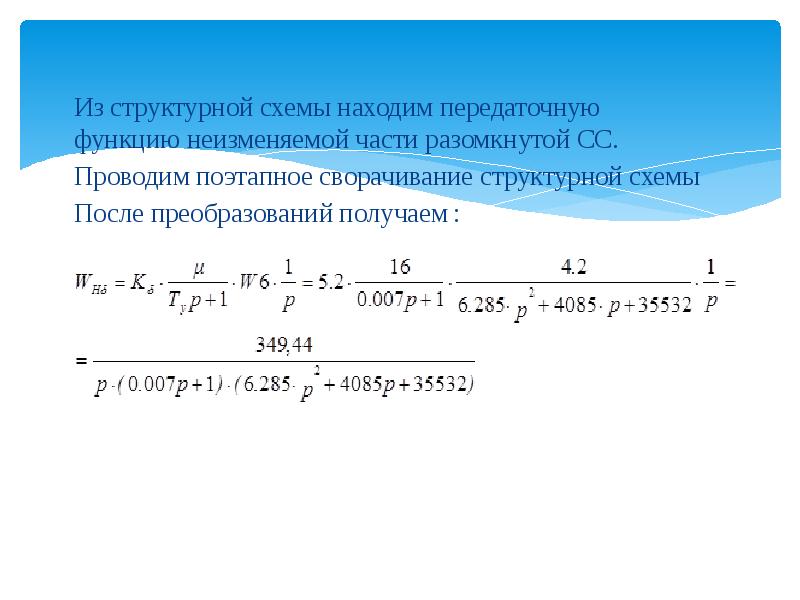
Содержание слайда: Из структурной схемы находим передаточную функцию неизменяемой части разомкнутой СС.
Из структурной схемы находим передаточную функцию неизменяемой части разомкнутой СС.
Проводим поэтапное сворачивание структурной схемы
После преобразований получаем :
№9 слайд

Содержание слайда: 3. Построение ЛАЧХ неизменяемой части следящей системы
Рисунок 3 - ЛАЧХ
№10 слайд

Содержание слайда: Если бы ЛАЧХ LНЧ везде совпала бы с желаемой ЛАЧХ LЖ , то корректирующего устройства не потребовалось. Поэтому, в общем случае, требуется введение корректирующего устройства, которое обеспечит работу СС с желаемой ЛАЧХ, что гарантирует выполнение заданных в проекте показателей качества при заданных изменениях входного сигнала
Если бы ЛАЧХ LНЧ везде совпала бы с желаемой ЛАЧХ LЖ , то корректирующего устройства не потребовалось. Поэтому, в общем случае, требуется введение корректирующего устройства, которое обеспечит работу СС с желаемой ЛАЧХ, что гарантирует выполнение заданных в проекте показателей качества при заданных изменениях входного сигнала
№11 слайд

Содержание слайда: 4. Расчет передаточной функции последовательного КУ1
Так как КУ1 соединен последовательно с неизменяемой частью СС, то
После ряда преобразований, выполним деление в соответствии с предыдущей формулой и получим :
№12 слайд

Содержание слайда: 5.Составление и расчет принципиальной электрической схемы КУ1
Схема КУ1 будет состоять из последовательно соединенных простейших блоков, каждый из которых реализует одну из простейших дробей выражения
с точностью до постоянного множителя. Следовательно, для рассматриваемого примера будет последовательное соединение блоков.
№13 слайд

Содержание слайда: Рисунок 9 - Принципиальная электрическая схем КУ1
№14 слайд

Содержание слайда: Выводы
Выводы
СС может нормально функционировать при введении только КУ1 .
Общий коэффициент усиления схем на ОУ1…ОУ3 составляет kОУ1.ОУ2.ОУ3= 75212.5 дБ,что больше требуемого коэффициент усиления kун =16288 дБ, именно поэтому вводить дополнительно усилитель не требуется.
№15 слайд

Содержание слайда: Спасибо за внимание !
Спасибо за внимание !
Скачать все slide презентации Синтез и анализ систем автоматического управления следящих систем на судах одним архивом: