Презентация Использование метода ЛАЧХ для синтеза регуляторов манипулятора с гибким стержнем онлайн
На нашем сайте вы можете скачать и просмотреть онлайн доклад-презентацию на тему Использование метода ЛАЧХ для синтеза регуляторов манипулятора с гибким стержнем абсолютно бесплатно. Урок-презентация на эту тему содержит всего 27 слайдов. Все материалы созданы в программе PowerPoint и имеют формат ppt или же pptx. Материалы и темы для презентаций взяты из открытых источников и загружены их авторами, за качество и достоверность информации в них администрация сайта не отвечает, все права принадлежат их создателям. Если вы нашли то, что искали, отблагодарите авторов - поделитесь ссылкой в социальных сетях, а наш сайт добавьте в закладки.
Оцените презентацию от 1 до 5 баллов!
- Тип файла:ppt / pptx (powerpoint)
- Всего слайдов:27 слайдов
- Для класса:1,2,3,4,5,6,7,8,9,10,11
- Размер файла:692.00 kB
- Просмотров:80
- Скачиваний:0
- Автор:неизвестен
Слайды и текст к этой презентации:
№1 слайд
Содержание слайда: Использование метода ЛАЧХ для синтеза регуляторов манипулятора с гибким стержнем.
Выполнил Скалов Б. Ю
Руководитель работы: к.т.н., доц. Смарунь А.Б.
№2 слайд
Содержание слайда: Актуальность работы
Манипулятор с рабочим органом в виде вязкоупругого стержня – сложная комбинированная система, состоящая из сосредоточенных и распределенных элементов. Для синтеза регулятора таких систем используются методы параметрической оптимизации, которые сложны и не наглядны.
Является актуальным использовать для синтеза регулятора таких систем хорошо известный инженерам и наглядный метод логарифмических амплитудных и фазовых частотных характеристик.
№3 слайд

Содержание слайда: Цель работы
Целью работы является исследование возможности применения метода логарифмических амплитудно-частотных характеристик для синтеза регулятора системы управления манипулятором с упругим стержнем.
№4 слайд

Содержание слайда:
№5 слайд
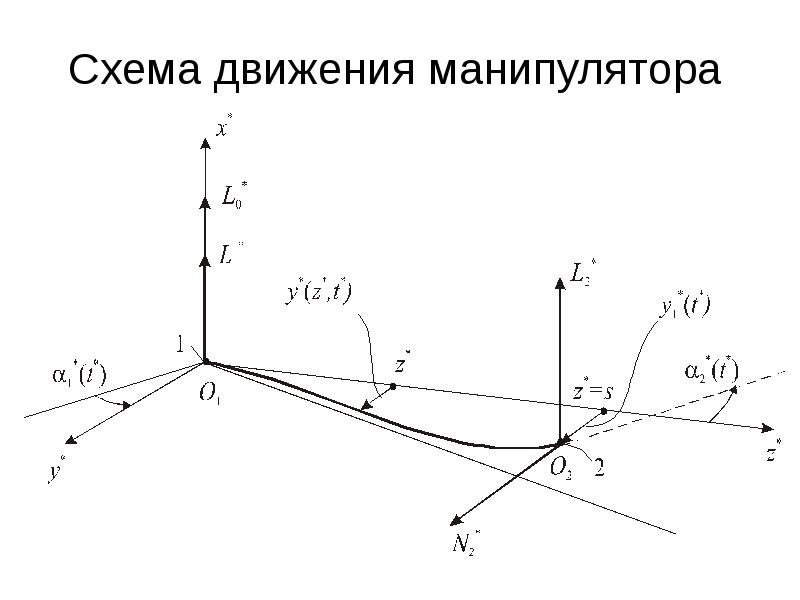
Содержание слайда: Схема движения манипулятора
№6 слайд

Содержание слайда: Уравнения движения манипулятора в размерной форме
№7 слайд

Содержание слайда: Уравнения движения манипулятора в размерной форме
№8 слайд

Содержание слайда: Приведение уравнений к безразмерной форме
№9 слайд

Содержание слайда: Приведение уравнений к безразмерной форме
№10 слайд

Содержание слайда: Уравнения движения манипулятора в безразмерной форме
№11 слайд
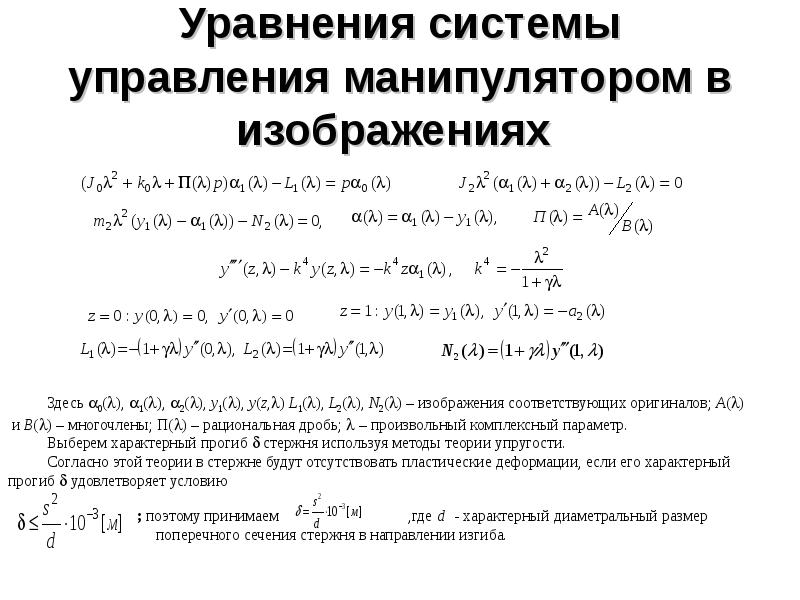
Содержание слайда: Уравнения системы управления манипулятором в изображениях
№12 слайд

Содержание слайда: Передаточные функции замкнутой и разомкнутой систем стабилизации манипулятора
№13 слайд

Содержание слайда: Синтез регулятора для системы управления манипулятором по методу ЛАЧХ
№14 слайд

Содержание слайда: ЛАФЧХ системы управления при T=0.36
№15 слайд

Содержание слайда: Амплитудная частотная характеристика замкнутой системы
№16 слайд
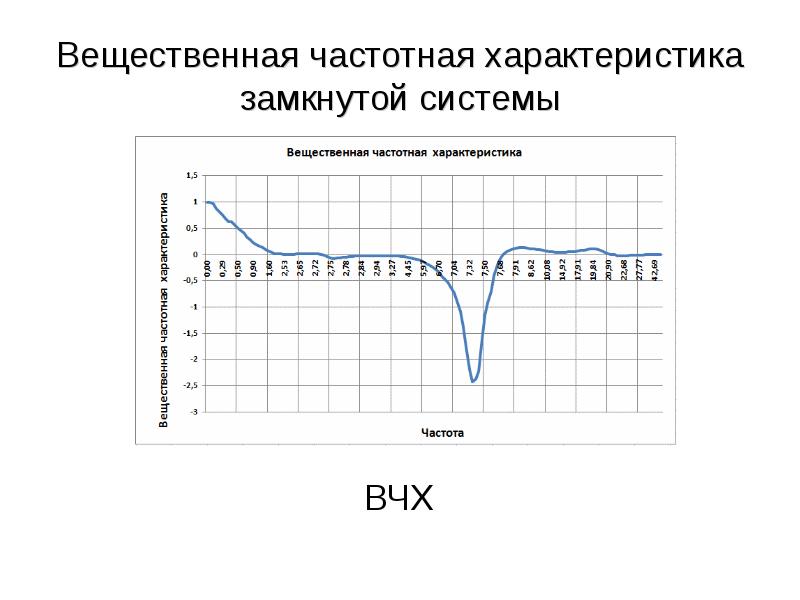
Содержание слайда: Вещественная частотная характеристика замкнутой системы
ВЧХ
№17 слайд
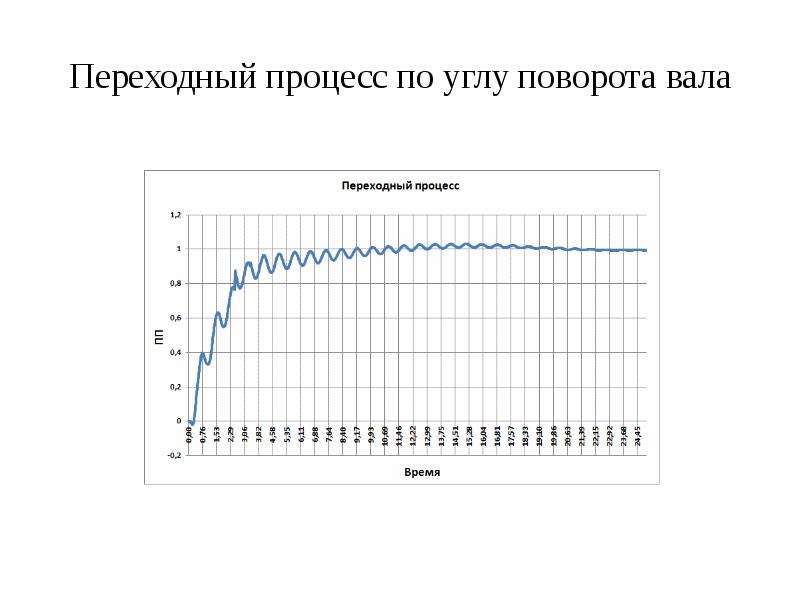
Содержание слайда: Переходный процесс по углу поворота вала
№18 слайд
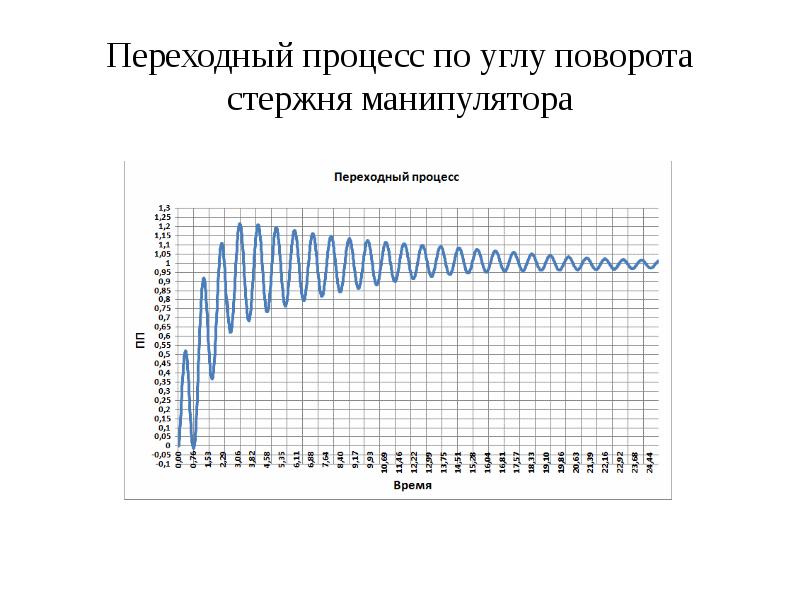
Содержание слайда: Переходный процесс по углу поворота стержня манипулятора
№19 слайд
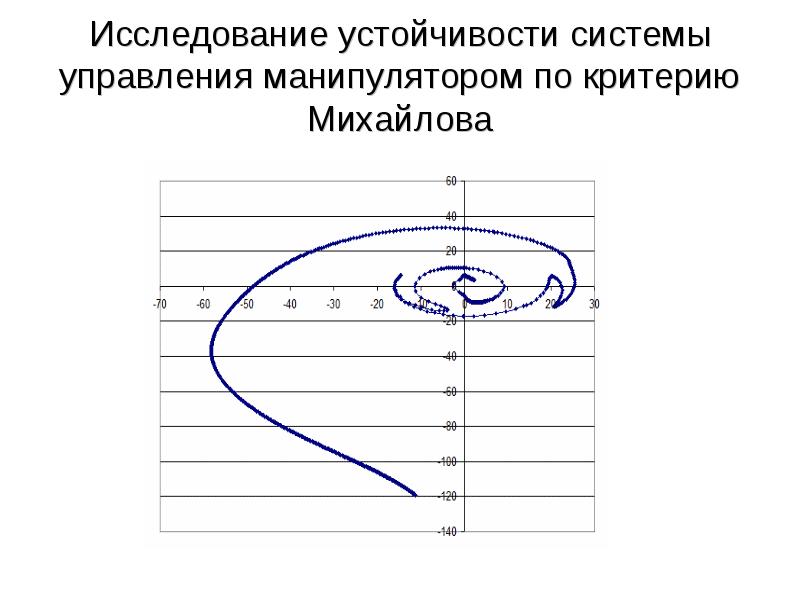
Содержание слайда: Исследование устойчивости системы управления манипулятором по критерию Михайлова
№20 слайд
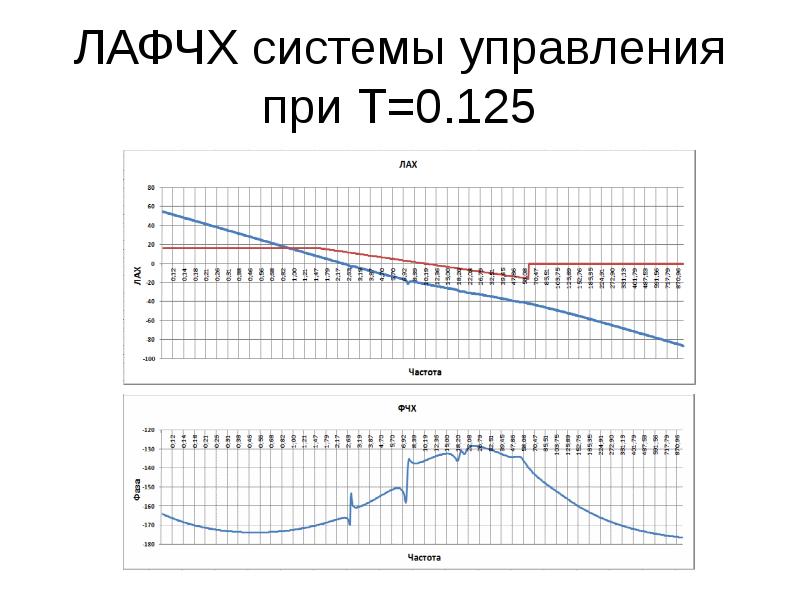
Содержание слайда: ЛАФЧХ системы управления при T=0.125
№21 слайд

Содержание слайда: Амплитудная частотная характеристика замкнутой системы
№22 слайд
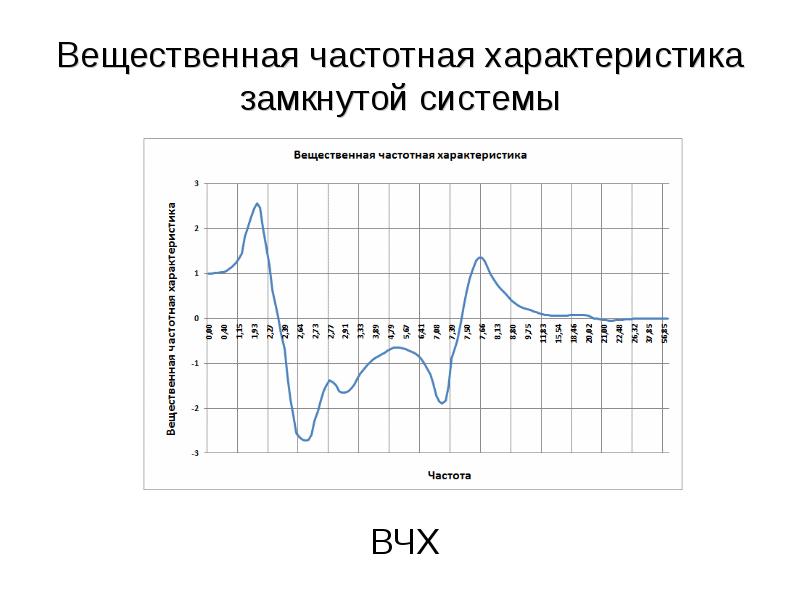
Содержание слайда: Вещественная частотная характеристика замкнутой системы
ВЧХ
№23 слайд
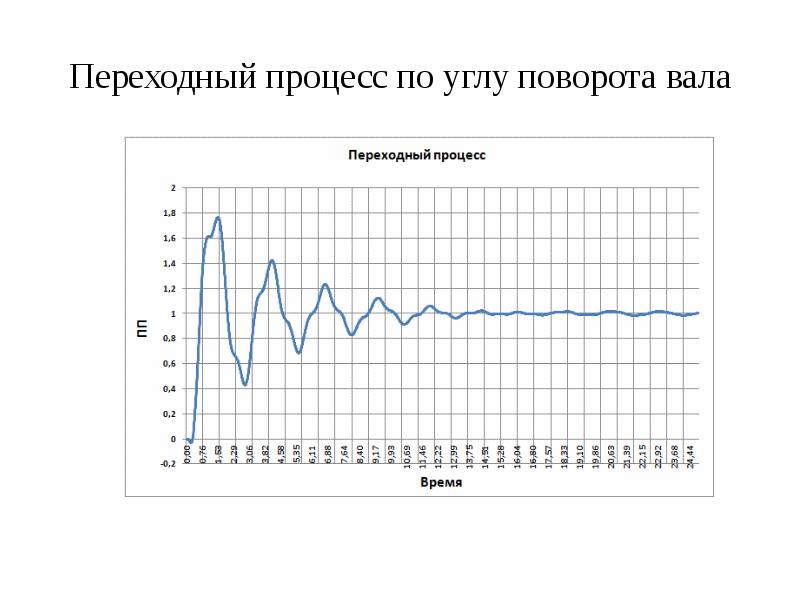
Содержание слайда: Переходный процесс по углу поворота вала
№24 слайд

Содержание слайда: Переходный процесс по углу поворота стержня манипулятора
№25 слайд

Содержание слайда: Таблица частотных характеристик
№26 слайд

Содержание слайда: ЗАКЛЮЧЕНИЕ
СФОРМУЛИРУЕМ ОСНОВНЫЕ РЕЗУЛЬТАТЫ И ВЫВОДЫ ПО ВЫПУСКНОЙ КВАЛИФИКАЦИОННОЙ РАБОТЕ:
1. Разработаны размерная и безразмерная математические модели системы управления манипулятора с рабочим инструментом в виде вязкоупругого стержня.
2. Сформирована структурная схема системы управления плоским движением манипулятора с вязкоупругим стержнем. Получены передаточные функции разомкнутой и замкнутой систем управления манипулятором.
3. Методом логарифмических амплитудных и фазовых частотных характеристик получены корректирующие устройства для системы управления плоским движением манипулятора с вязкоупругим стержнем, для разных значений частотных показателей качества управления.
4. Показано, что для системы управления манипулятора с рабочим инструментом в виде вязкоупругого стержня для получения приемлемых показателей переходных процессов требуются более высокие частотные показатели качеств по сравнению с системами с сосредоточенными параметрами.
№27 слайд

Содержание слайда: СПАСИБО ЗА ВНИМАНИЕ
Скачать все slide презентации Использование метода ЛАЧХ для синтеза регуляторов манипулятора с гибким стержнем одним архивом: